Régression linéaire multiple - Définition
La liste des auteurs de cet article est disponible ici.
Modèle théorique
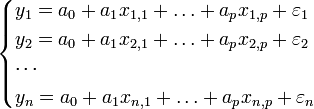
La régression linéaire multiple est une généralisation, à p variables explicatives, de la régression linéaire simple.
Nous sommes toujours dans le cadre de la régression mathématique : étant donné un échantillon ![]() nous cherchons à expliquer, avec le plus de précision possible, les valeurs prises par Yi, dite variable endogène, à partir d'une série de variables explicatives
nous cherchons à expliquer, avec le plus de précision possible, les valeurs prises par Yi, dite variable endogène, à partir d'une série de variables explicatives ![]() . Le modèle théorique, formulé en termes de variables aléatoires, prend la forme
. Le modèle théorique, formulé en termes de variables aléatoires, prend la forme
où ![]() est l'erreur du modèle qui exprime, ou résume, l'information manquante dans l'explication linéaire des valeurs de Yi à partir des
est l'erreur du modèle qui exprime, ou résume, l'information manquante dans l'explication linéaire des valeurs de Yi à partir des ![]() (problème de spécifications, variables non prises en compte, etc.).
(problème de spécifications, variables non prises en compte, etc.). ![]() sont les paramètres à estimer.
sont les paramètres à estimer.
Exemple
Nous relevons 20 fois les paramètres suivants : la demande totale en électricité (ce sera notre yi, i étant compris entre 1 et 20) la température extérieure (ce sera notre xi1) l'heure à laquelle les données sont prises (ce sera notre xi2)
Faire une régression linéaire revient à déterminer les ao, a1 et a2 et ![]() tels que, quelle que soit la mesure prise, on ait :
tels que, quelle que soit la mesure prise, on ait : ![]()
Estimation
Lorsque nous disposons de n observations ![]() , qui sont des réalisations des variables aléatoires
, qui sont des réalisations des variables aléatoires ![]() , l'équation de régression s'écrit
, l'équation de régression s'écrit
La problématique reste la même que pour la régression simple :
- estimer les paramètres ai en exploitant les observations ;
- évaluer la précision de ces estimateurs ;
- mesurer le pouvoir explicatif du modèle ;
- évaluer l'influence des variables dans le modèle :
- globalement (les p variables en bloc) et,
- individuellement (chaque variable) ;
- évaluer la qualité du modèle lors de la prédiction (intervalle de prédiction) ;
- détecter les observations qui peuvent influencer exagérément les résultats (points atypiques).
Notation matricielle
Nous pouvons adopter une écriture condensée qui rend la lecture et la manipulation de l'ensemble plus facile. Les équations suivantes
peuvent être résumées avec la notation matricielle
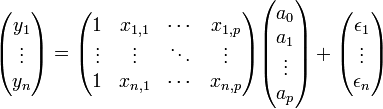
Soit de manière compacte: ![]()
avec
- y est de dimension (n, 1)
- X est de dimension (n, p + 1)
- a est de dimension (p+1, 1)
- ε est de dimension (n, 1)
- la première colonne sert à indiquer que nous procédons à une régression avec constante.
Hypothèses
Comme en régression simple, les hypothèses permettent de déterminer : les propriétés des estimateurs (biais, convergence) ; et leurs lois de distributions (pour les estimations par intervalle et les tests d'hypothèses).
Il existe principalement deux catégories d'hypothèses :
- Hypothèses stochastiques
 Les X j sont aléatoires, j = 1, …, p ;
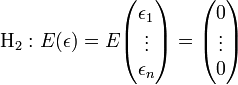
Les X j sont aléatoires, j = 1, …, p ; Le modèle est bien spécifié en moyenne ;
Le modèle est bien spécifié en moyenne ; Homoscedasticité (en) des erreurs (variance constante)
Homoscedasticité (en) des erreurs (variance constante) Pas d'autocorrélation des erreurs.
Pas d'autocorrélation des erreurs. Les erreurs sont linéairement indépendantes des variables exogènes.
Les erreurs sont linéairement indépendantes des variables exogènes. Les erreurs suivent une loi normale multidimensionnelle (H6 implique les hypothèses H2, H3 et H4 la réciproque étant fausse car les 3 hypothèses réunies n'impliquent pas que
Les erreurs suivent une loi normale multidimensionnelle (H6 implique les hypothèses H2, H3 et H4 la réciproque étant fausse car les 3 hypothèses réunies n'impliquent pas que  soit un vecteur gaussien).
soit un vecteur gaussien).
- Hypothèses structurelles
 absence de colinéarité entre les variables explicatives, i.e. X 'X est régulière, det(X 'X) ≠ 0 et (X 'X)-1 existe (remarque : c'est équivalent à rang(X) = rang(X 'X) = p + 1) ;
absence de colinéarité entre les variables explicatives, i.e. X 'X est régulière, det(X 'X) ≠ 0 et (X 'X)-1 existe (remarque : c'est équivalent à rang(X) = rang(X 'X) = p + 1) ; tend vers une matrice finie non singulière lorsque n → +∞ ;
tend vers une matrice finie non singulière lorsque n → +∞ ; Le nombre d'observations est supérieur au nombre de variables + 1 (la constante). S'il y avait égalité, le nombre d'équations serait égal au nombre d'inconnues aj, la droite de régression passerait par tous les points, nous serions face à un problème d'interpolation linéaire (voir Interpolation numérique).
Le nombre d'observations est supérieur au nombre de variables + 1 (la constante). S'il y avait égalité, le nombre d'équations serait égal au nombre d'inconnues aj, la droite de régression passerait par tous les points, nous serions face à un problème d'interpolation linéaire (voir Interpolation numérique).
- Écriture matricielle de l'hypothèse H6
Sous l'hypothèse d'homoscedasticité et d'absence d'auto-corrélation, la matrice de variance-covariance du vecteur des erreurs peut s'écrire:

Régresseurs stochastiques
Dans certains cas, l'hypothèse (H1) est intenable : les régresseurs X sont supposés aléatoires. Mais dans ce cas, on suppose que X est aléatoire mais est indépendant de l'aléa ![]() . On remplace alors l'hypothèse (H2) par une hypothèse sur l'espérance conditionnelle:
. On remplace alors l'hypothèse (H2) par une hypothèse sur l'espérance conditionnelle:
De même, il faudrait changer en conséquence les hypothèses (H3), (H4) et aussi (H5).