Vecteur - Définition
La liste des auteurs de cet article est disponible ici.
Approche géométrique
La géométrie euclidienne est la géométrie du plan ou de l'espace fondée sur les axiomes d'Euclide. Les notions de point, de droite, de longueur, sont introduits par le biais d'axiomes. Le vecteur est alors un objet géométrique construit à partir des précédents.
Une visualisation intuitive d'un vecteur correspond à un déplacement d'un point, ou pour utiliser le terme mathématique précis, une translation. Ainsi un vecteur possède une longueur, la distance entre le point de départ et d'arrivée, une direction si le déplacement n'est pas nul, c'est la droite contenant le point de départ et d'arrivée et un sens, depuis le départ jusqu'à l'arrivée.
Définition
Un vecteur est représenté par un segment orienté (une flèche) ayant pour extrémités un point de départ et un point d'arrivée. L’emplacement dans le plan ou l'espace n’a pas d’importance, deux déplacements de deux points d'origine distincts peuvent correspondre au même vecteur, seuls comptent sa longueur, sa direction et son sens. Il est donc possible de le faire glisser librement dans le plan, parallèlement à lui-même.
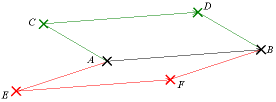
Une définition formelle utilise au préalable la notion de bipoint. Il est défini comme un couple de points. L’ordre a une importance : le premier point est appelé origine. Deux bipoints (A,B) et (C,D) sont dits équipollents lorsque ABDC est un parallélogramme. La relation d'équipollence constitue une relation d'équivalence sur les bipoints. Une classe d'équivalence contient tous les bipoints dont le deuxième membre est l'image du premier point par le déplacement.
La classe d'équivalence d'un bipoint (A,B) est appelée vecteur et est notée ![]() . Le bipoint (A,B) en est un représentant. Réciproquement, tout vecteur admet plusieurs bipoints représentants, dont aucun n'est privilégié. Si une origine est choisie, il existe un unique bipoint représentant un vecteur donné.
. Le bipoint (A,B) en est un représentant. Réciproquement, tout vecteur admet plusieurs bipoints représentants, dont aucun n'est privilégié. Si une origine est choisie, il existe un unique bipoint représentant un vecteur donné.
Ainsi deux bipoints (A,B) et (C,D) sont équipollents si et seulement s'ils représentent le même vecteur et on peut alors écrire l'égalité
Tous les bipoints constitués de la répétition d'un même point : (A,A), sont équipollents entre eux, ils sont les représentants d'un vecteur qualifié de nul. Il est noté
 .
.
Les théories présentant les vecteurs comme une classe d'équivalence de bipoints les notent en général par une lettre surmontée d'une flèche.
Longueur et angle
La longueur d'un bipoint (A,B) est définie comme la longueur du segment sous-jacent. Deux bipoints équipollents ont la même longueur. Tous les représentants d'un vecteur ![]() ont donc la même longueur, qui est appelée norme(ou module) du vecteur
ont donc la même longueur, qui est appelée norme(ou module) du vecteur ![]() et notée en général
et notée en général ![]() (on utilise aussi parfois simplement la ou les lettres désignant le vecteur sans la flèche, par exemple u ou AB). Un vecteur unitaire est un vecteur de norme 1. Le vecteur nul est de norme nulle,
(on utilise aussi parfois simplement la ou les lettres désignant le vecteur sans la flèche, par exemple u ou AB). Un vecteur unitaire est un vecteur de norme 1. Le vecteur nul est de norme nulle, ![]() .
.
L’angle que forment deux vecteurs ![]() et
et ![]() est noté
est noté ![]() . Il est défini comme l'angle que font deux représentants de même origine. Ainsi si (A, B) est un représentant de
. Il est défini comme l'angle que font deux représentants de même origine. Ainsi si (A, B) est un représentant de ![]() et (A,C) un représentant de
et (A,C) un représentant de ![]() , alors
, alors
Dans le plan orienté, il est possible de définir la notion d'angle orienté de deux vecteurs. Ce n'est pas le cas dans l'espace.
Opérations
Des constructions géométriques permettent la définition de l'addition et de la multiplication par un scalaire. Le nom donnée aux opérations est la conséquence de la similarité avec les opérations sur les nombres (commutativité, associativité et distributivité, présence d'un élément neutre et absorbant). Pour cette raison, non seulement les noms des opérations mais les notations sont similaires.
Si ![]() et
et ![]() sont deux vecteurs, soit un couple (A, B) de points représentant
sont deux vecteurs, soit un couple (A, B) de points représentant ![]() et C le point tel que le couple (B, C) représente le vecteur
et C le point tel que le couple (B, C) représente le vecteur ![]() . Alors un représentant du vecteur
. Alors un représentant du vecteur ![]() est le couple (A, C). Si
est le couple (A, C). Si ![]() est le vecteur nul, alors les points B et C sont confondus, la somme est alors égale à
est le vecteur nul, alors les points B et C sont confondus, la somme est alors égale à ![]() et le vecteur nul est bien l'élément neutre pour l'addition des vecteurs. Soit α un nombre, si
et le vecteur nul est bien l'élément neutre pour l'addition des vecteurs. Soit α un nombre, si ![]() est le vecteur nul, alors α.
est le vecteur nul, alors α.![]() est aussi le vecteur nul, sinon il existe une unique droite contenant A et B, et un unique point C tel que la distance entre A et C soit égale à
est aussi le vecteur nul, sinon il existe une unique droite contenant A et B, et un unique point C tel que la distance entre A et C soit égale à ![]() et le sens de (A,B) si α est positif, relativement au sens de
et le sens de (A,B) si α est positif, relativement au sens de ![]() , et l'inverse sinon.
, et l'inverse sinon.
Une fois équipée d'une structure d'espace vectoriel, les démonstrations de la géométrie euclidienne s’avèrent souvent simplifiées. Un exemple est donné par le théorème de Thalès.
Formalisation

On ne trouve pas de vecteurs dans les éléments d'Euclide, mais les notions de point ou de parallélogramme, de l'approche esquissée ci-dessus y sont bien présentes. Mais l'axiomatisation des éléments n'est pas tout à fait satisfaisante, bien qu'elle ait été longtemps un modèle en la matière : certains axiomes restent implicites. David Hilbert a montré comment axiomatiser rigoureusement le plan ou l'espace affine de façon géométrique (voir les articles plan affine de Desargues et axiomes de Hilbert). En utilisant le parrallélisme, il est alors possible de définir les translations et les homothéties, et en utilisant ces transformations, les vecteurs et les scalaires. Cette approche est très générale : elle permet de traiter des cas utiles, où les scalaires ne sont pas forcément des réels, mais par exemple des complexes ou les éléments d'un ensemble fini de nombres. Elle se généralise également en dimension quelconque, au moins finie.
Cependant le développement des mathématiques a élargi considérablement les domaines d'utilisation des vecteurs, et une approche plus algébrique est très largement utilisée. Elle est fondée sur deux ensembles : l'un contenant les scalaires, l'autre les vecteurs. Le deuxième est appelé espace vectoriel. Ces deux ensembles sont munis d'opérations et des axiomes sont vérifiés pour chacune des opérations. Cette construction différente pour formaliser le même concept de vecteur est celle qui est traitée dans l'article consacré aux espaces vectoriels. Elle est esquissée ci-dessous.