Tenseur - Définition
La liste des auteurs de cet article est disponible ici.
Composantes
Vecteurs
Dans la base ![]() , les composantes du vecteur
, les composantes du vecteur ![]() sont (u1, u2, u3). Dans la base
sont (u1, u2, u3). Dans la base ![]() , elles sont (u'1, u'2, u'3). On cherche comment passer de l'une à l'autre des représentations.
, elles sont (u'1, u'2, u'3). On cherche comment passer de l'une à l'autre des représentations.
Dans la base B, les vecteurs de la base B' s'écrivent :
Par définition d'une base, chaque vecteur ![]() se décompose selon une combinaison linéaire unique des vecteurs de B'. On peut ainsi définir la matrice de changement de base P de B vers B' :
se décompose selon une combinaison linéaire unique des vecteurs de B'. On peut ainsi définir la matrice de changement de base P de B vers B' :
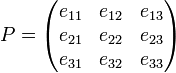
les colonnes de la matrice de changement de base sont les coordonnées des vecteurs de l'ancienne base dans la nouvelle. On a alors
 et
et .
.
Lorsque les deux bases B et B' sont orthonormées, P vérifie en outre
- P − 1 = tP.
Le changement de base se fait par multiplication d'une seule matrice de changement de base, le tenseur est dit d'ordre 1.
Matrices
Une matrice M représente une application linéaire ƒ d'un espace vers un autre pour une base donnée dans chaque espace. On peut donc changer de base dans l'espace de départ et dans l'espace d'arrivée. On peut donc définir deux matrices, P1 et P2 pour chacun des espaces. La matrice M' représentant ƒ pour les deux nouvelles bases se calcule donc en faisant
Le changement de base se fait par multiplication de deux matrices de changement de base, le tenseur est dit d'ordre 2.
Formes linéaires
Considérons un espace à trois dimensions muni d'une base non orthogonale (on va la supposer normée pour simplifier la présentation). En effet, il y a de nombreux exemples dans la nature où il y a des axes « naturels » qui ne sont pas orthogonaux, par exemples les axes de certains cristaux. En fait, lorsqu'un phénomène est anisotrope, on peut souvent trouver des axes dits « principaux » pour lesquels les calculs se simplifient, et ces axes ne sont pas toujours orthogonaux.
Considérons une forme linéaire ƒ sur cet espace, qui à un vecteur ![]() associe un scalaire
associe un scalaire
(les indices relatifs à la forme linéaire sont notés en haut pour permettre de les distinguer). Considérons la base ![]() , dite « base duale », définie par
, dite « base duale », définie par

on a alors
 (symbole de Kronecker)
(symbole de Kronecker)
soit
 si i = j
si i = j sinon
sinon
Si l'on définit le vecteur
on peut alors écrire
La base des fonctions g i « produit scalaire par ![]() »
»
est une base des formes linéaires de l'espace ; on identifie souvent cette base de fonctions (g i ) avec la base de vecteurs ![]() elle-même. L'espace vectoriel formé par les formes linéaires est appelé « espace dual » ou « espace réciproque ».
elle-même. L'espace vectoriel formé par les formes linéaires est appelé « espace dual » ou « espace réciproque ».
Si l'on fait un changement de base de l'espace direct, alors les composantes du vecteur ![]() se transforment selon
se transforment selon
où p ji est le coefficient de la matrice de changement de base (noté eji dans le paragraphe précédent). En revanche, les composantes de ![]() se transforment selon
se transforment selon
on voit que dans le cas du changement de la base de formes linéaires, on multiplie par la matrice de changement de base, alors que dans le cas du changement de la base de vecteurs, on multiplie par sa transposée.
Variance
On voit donc que l'on a deux types d'indices. D'une part des indices de type « vecteur », notés avec un indice en bas (par exemple ui ), obtenus par projection du vecteur sur les axes parallèlement aux autres axes, et se transformant lors d'un changement de base par le produit de la transposée de la matrice de changement de base (P). Ces indices sont dits contravariants.
D'autre part des indices de type « forme linéaire », notés avec un indice en haut (par exemple ƒi ), obtenus par projection sur les axes perpendiculairement aux axes (![]() et
et ![]() sont perpendiculaires à
sont perpendiculaires à ![]() ), et se transformant lors d'un changement de base par le produit de la matrice « directe » de changement de base (P). Ces indices sont dites covariants.
), et se transformant lors d'un changement de base par le produit de la matrice « directe » de changement de base (P). Ces indices sont dites covariants.
D'après la formule de changement de base des matrices, on voit que celles-ci sont une fois covariantes, une fois contravariantes, on devrait donc noter Mi j. Toutefois, on n'utilise que rarement cette notation tensorielle pour les matrices.
Convention d'Einstein
Un tenseur peut avoir des composantes covariantes et contravariantes, ce qui explique que certains indices soient notés en haut et d'autres en bas, par exemple Tabc.
On adopte souvent la convention de notation d'Einstein qui consiste à sommer lorsqu'un indice se trouve en haut et en bas dans un produit, par exemple
 et
et 
se notent respectivement
 et
et 