Satellite artificiel - Définition
La liste des auteurs de cet article est disponible ici.
Fiche d'identité d'un satellite
Un satellite est constitué de deux sous-ensembles :
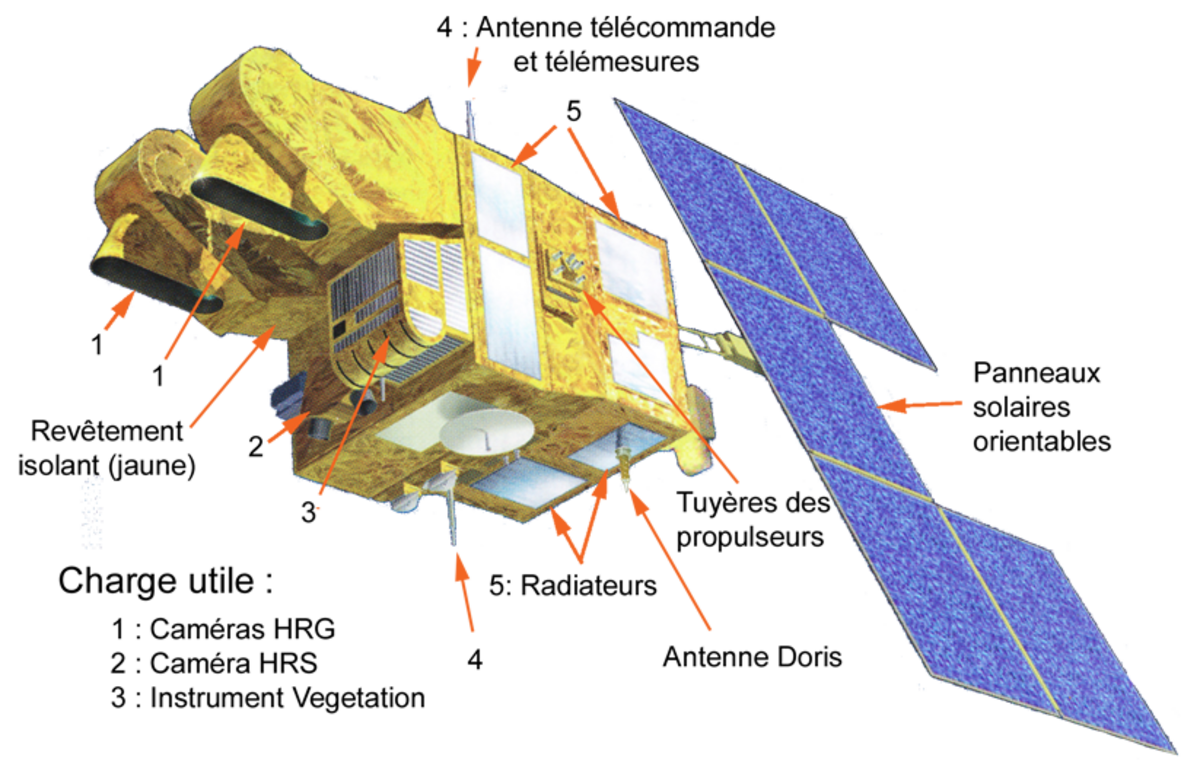
- la charge utile qui regroupe les instruments nécessaires pour remplir la mission : antennes et amplificateurs pour un satellite de télécommunications, instrument d'optique pour l'observation de la Terre, etc. ;
- la plate-forme, ou module de service, qui supporte la charge utile et qui lui fournit les ressources dont elle a besoin pour son fonctionnement (électricité…), maintient le satellite sur son orbite selon l'orientation demandée et assure la liaison avec les stations à Terre.
Les principales caractéristiques d'un satellite sont sa charge utile, sa masse, sa durée de vie opérationnelle, son orbite et sa plate-forme.
Charge utile
La charge utile est le sous-ensemble du satellite chargé de mener à bien sa mission. Elle varie en fonction du type de satellite :
- Transpondeurs pour un satellite de télécommunications ;
- Caméra ou radar pour un satellite d'observation ;
- Télescope pour un satellite d'observation astronomique ;
- etc.
Masse
La masse d'un satellite est un des principaux facteurs de coût : le lancement d'un kilo en orbite basse revient de 10 000 à 30 000 $/kg selon le lanceur utilisé (2004). Mais dans le domaine des télécommunications un satellite lourd dispose de capacités plus importantes — nombre de communications simultanées pour un satellite de télécommunications, nombre d'instruments embarqués pour un satellite scientifique — et d'une durée de vie allongée grâce à l'emport d'une plus grande quantité de carburant. Les satellites les plus massifs sont les satellites de télédétection, en orbite basse, qui peuvent atteindre 20 tonnes : des satellites de reconnaissance militaire (KH-11, 19,6 tonnes) ou civils (ENVISAT, 8 tonnes).
La masse maximale des satellites (en particulier pour l'orbite géostationnaire) a longtemps été limitée par la capacité des lanceurs et elle a cru progressivement pour les besoins des télécommunications jusque dans les années 1990 :
Selon le type de mission, la ventilation de la masse peut être très différente :
| Satellite d'observation Spot 4 | Satellite géostationnaire durée de vie 15 ans | |
|---|---|---|
| Plate-forme | 1 100 kg | 1 620 kg |
| Charge utile | 1 060 kg | 660 kg |
| Total masse sèche | 2 170 kg | 2 280 kg |
| Ergols | 160 kg | 2 780 kg |
| Masse au lancement | 2 330 kg | 5 060 kg |
La miniaturisation de l'électronique permet aujourd'hui de concevoir des satellites complets et dotés de fonctionnalités avancées pesant quelques dizaines de kilos. Parmi les satellites légers on distingue :
- les minisatellites (ou minisat) de quelques centaines de kg, telle la filière Proteus ;
- les microsatellites (ou microsat) de 10 à 100 kg. Ils sont surtout utilisés pour des missions scientifiques ou d'observation (Parasol) ou pour valider des solutions techniques (Smart). Sous forme de constellation, ils peuvent remplir une mission qui serait normalement dévolue à un satellite de taille normale (Essaim). Un opérateur commercial de services de messagerie et de localisation (Orbcomm) a utilisé une constellation de satellites de 40 kg avec un succès mitigé du fait des capacités limitées des satellites ;
- les nanosatellites de quelques kg essentiellement utilisés comme démonstrateurs technologiques ou pour des expériences scientifiques limitées. Ce format est très prisé par les universités.
Durée de vie
La durée de vie d'un satellite est liée au type de mission. Un satellite de télécommunications récent (par exemple Hotbird 10 mis en orbite début 2009) est construit pour fonctionner une quinzaine d'années tandis qu'un satellite d'observation, comme ceux de la série Spot, est construit pour une durée de vie de 5 ans. La fin de vie d'un satellite est souvent liée à l'épuisement des ergols qui lui permettent de maintenir son orbite sur une trajectoire nominale et d'orienter ses instruments. Les autres équipements vulnérables sont les batteries qui, sur certains types de missions, peuvent être épuisées par des cycles de charge/décharge répétés et l'électronique. Le fonctionnement de certains satellites scientifiques (télescope infrarouge...) utilise de l'hélium liquide embarqué pour le refroidissement qui une fois épuisé entraîne l'arrêt de l'instrument.
Les pannes peuvent être également à l'origine d'un arrêt total ou partiel du fonctionnement d'un satellite. Une étude effectuée sur les satellites géostationnaires pour la période 1965-1990 recense la défaillance totale de 13 satellites géostationnaires et 355 pannes partielles. Ces pannes touchent dans 39 % des cas la charge utile, 20 % le système de contrôle de l'orientation et de l'orbite, 9,6 % la propulsion, 9,3 % l'alimentation électrique et 9,2 % des composants mécaniques. Ces défaillances ont pour origine la conception (25 %), l'environnement (22 %) ou encore les composants (16 %).
La plate-forme
La plate-forme (bus en anglais), ou module de service regroupe tous les composants du satellite qui lui permettent de fonctionner. La composition relativement immuable de la plate-forme permet aux principaux fabricants de satellites de proposer des modèles standards correspondant aux missions les plus fréquentes :
| Constructeur | Désignation | Masse charge utile | Masse totale | Puissance électrique | Type d'orbite | Durée de vie | Particularités / remarques |
|---|---|---|---|---|---|---|---|
| Boeing | Boeing 601 | 48 ou 60 transpondeurs | de 2,5 à 4,5 t | 4,8 kW 10 kW (HP) | géostationnaire / moyenne | Moteur ionique (option) | |
| Boeing | Boeing 702 | 4,5 - 6,5 t | 7-18 kW | géostationnaire | 7 ans | Moteur ionique | |
| Astrium | Eurostar E2000+ | 550 kg | 3,4 t | 4-7 kW | géostationnaire | 12 ans | |
| Astrium | Eurostar E3000 | 1 000 kg | 4,8 - 6,4 t | > 16 kW (C.U. de 4 à 14 kW) | géostationnaire | 15 ans | Propulsion électrique (option) |
| OHB | Small Geo | 300 kg | 3 kW | géostationnaire | 15 ans | Propulsion électrique | |
| Thales Alenia Space (TAS) | Spacebus 3000 | 2,5 - 5,2 t | géostationnaire | 15 ans | |||
| Thales Alenia Space | Spacebus 4000 | 4,0 - 5,9 t | jusqu'à 15,8 kW (C.U. jusqu'à 11,6 kW) | géostationnaire | 15 ans | ||
| Astrium & TAS | Alphabus | 1 300 kg | 6,5 t | C.U. de 13 à 18 kW | géostationnaire | 15 ans | Propulsion électrique |
| Astrium | Pleiades | 900 kg | 600 kg | 1,4 kW | basse | 7 ans | |
| CNES/TAS | Proteus | 500 kg | 0,5 kW | basse | 5 ans | Jason, CALIPSO, SMOS | |
| CNES/Astrium-TAS | Myriade | 80 kg | 0,06 kW | basse | 2 ans | SPIRALE |
Une plate-forme comporte plusieurs sous-ensembles :
- la structure du satellite ;
- le système de production de l'énergie ;
- le système de contrôle thermique ;
- le système de contrôle d'attitude et d'orbite (SCAO) ;
- la gestion du bord qui pilote le fonctionnement du satellite ;
- le système de propulsion.
Un milieu spatial hostile
La conception des satellites doit prendre en compte le caractère profondément hostile du milieu spatial. Les satellites croisent dans un vide presque absolu (10-9 Pa). À cette pression, les atomes superficiels des solides ont tendance à se sublimer et les mécanismes se bloquent. Des lubrifiants développés pour fonctionner dans le vide doivent être utilisés. Dans le vide l'énergie thermique, produite en abondance par l'électronique des satellites, ne peut être évacuée que par rayonnement. Les éruptions solaires et les rayons cosmiques génèrent des erreurs dans le traitement des données par l'électronique du satellite. Si l'orbite du satellite l'amène à traverser les ceintures de Van Allen (cas des satellites géostationnaires ou en orbite moyenne et haute), cela peut entraîner la dégradation des composants électroniques, des matériaux et des instruments optiques. Le plasma de particules crée un risque de décharge électrostatique source de panne. Le rayonnement solaire dégrade progressivement le silicium des panneaux solaires en diminuant leur rendement.
La structure du satellite
La tenue mécanique du satellite est assurée par sa structure. Celle-ci supporte les principaux sous-ensembles fonctionnels du satellite. Elle assure également l'interface mécanique avec le lanceur.
La structure est dimensionnée pour faire face aux efforts mécaniques subis durant le vol propulsé. Le lancement de la fusée porteuse génère des vibrations importantes en provenance principalement des moteurs et des turbopompes qui sont transmises par le corps de la fusée au satellite et qui s'échelonnent dans des bandes de fréquence comprises entre 0 et 2000 hertz. Au décollage, le bruit atteint 150 décibels sous la coiffe qui abrite le satellite. Celui-ci subit également des accélérations et décélérations qui peuvent être particulièrement fortes lors de la séparation des étages, lorsque la coiffe est larguée et au moment de la séparation du lanceur et du satellite du fait de l'usage de charges pyrotechniques. Hormis ces chocs ponctuels, l'accélération la plus forte a lieu généralement durant la phase finale du vol propulsé (jusqu’à 4 ou 5 g). La structure doit être conçue pour résister à tous ces efforts tout en restant légère.
La structure doit être conçue de manière à limiter les déformations découlant des grandes différences de température entre les différentes parties du satellite une fois celui-ci placé en orbite : les axes de visée des capteurs, antennes et instruments doivent rester pratiquement invariants pour que le satellite puisse remplir sa mission de manière nominale. Cette exigence est particulièrement importante pour les télescopes spatiaux (position relative des miroirs). Pour satisfaire cette contrainte la structure est réalisée avec des matériaux ayant un faible coefficient de dilatation tels que les composites en carbone.
La production d'énergie
Le satellite doit disposer d'énergie électrique pour le fonctionnement de la charge utile et de la plate-forme. Les besoins en énergie électrique varient en fonction de la taille des satellites et du type d'application. Les plus gourmands sont les satellites de télécommunications qui consomment énormément d'énergie en amplifiant les signaux reçus. Les satellites d'observation utilisant des radars ont besoin également de beaucoup d'énergie mais de manière irrégulière. Les satellites mettant en œuvre des instruments d'observation passifs (télescopes spatiaux...) sont les moins exigeants, la puissance nécessaire étant comprise entre 1 et 15 kW (en 2009), une valeur relativement basse, grâce au recours à une électronique basse puissance sophistiquée.
La puissance électrique est généralement fournie par des panneaux solaires utilisant l'énergie solaire. Pour un satellite en orbite autour de la Terre, il faut en moyenne 40 m2 de panneaux solaires pour fournir 10 kW (l'envergure totale peut atteindre 40 mètres). L'orientation du satellite par rapport au Soleil est, du fait de sa trajectoire, constamment modifiée : les panneaux solaires doivent donc être réorientés en permanence pour que les rayons du Soleil les frappent à la perpendiculaire. Lorsque le satellite est en orbite géostationnaire ou héliosynchrone, il suffit que les panneaux puissent pivoter sur un seul axe, mais deux degrés de liberté sont nécessaires pour les autres orbites terrestres.
Le satellite en orbite autour de la Terre peut se trouver sur sa trajectoire dans le cône d'ombre de la Terre. Le phénomène peu fréquent pour les satellites géostationnaires (deux fois par an aux équinoxes) représente un tiers du temps de parcours d'un satellite héliosynchrone. Durant les périodes d'obscurité, le satellite puise son énergie dans des batteries qui sont alimentées durant la phase éclairée. Les décharges fréquentes des batteries des satellites en orbite basse limitent la durée de vie de celles-ci et constituent une des principales limitations de la durée de vie de ce type de satellite (en général inférieure à 5 ans).
Pour les satellites mis en orbite autour d'une planète lointaine du soleil, l'utilisation de cellules photovoltaïques devient impossible. On a recours alors, généralement, à l'électricité produite au moyen de générateur nucléaire, comme les générateurs thermoélectriques à radioisotopes (RTG). C'est le cas sur la sonde spatiale Cassini, devenue satellite artificiel de la planète Saturne, le 1er juillet 2004, l'électricité étant fournie par trois RTG devant produire au moins 628 W au bout de 11 années de mission.
Le système de contrôle thermique
Le système de contrôle thermique doit maintenir la température des composants du satellite dans une plage de valeurs qui est souvent proche de celle rencontrée sur terre (environ 20 °C). Le satellite subit de fortes contraintes thermiques avec des écarts de température qui peuvent atteindre 200 °C entre la face éclairée par le Soleil et les faces tournées vers l'espace. Les équipements et instruments embarqués convertissent l'énergie électrique qu'ils utilisent en énergie thermique qu'il est nécessaire d'évacuer. Or, le vide ne permet pas de dissiper cette énergie par convection de l'air et l'énergie doit donc être évacuée par radiation, un processus de refroidissement moins efficace.
Généralement le satellite est enveloppé dans plusieurs couches isolantes de kapton ou de mylar sur un support d'aluminium qui alternent avec des matériaux tels que la soie, le nomex ou le dacron. Cette couverture renvoie les rayonnements infrarouges et a une faible conductivité thermique. Les équipements qui produisent le plus de chaleur sont dans la mesure du possible installés sur des radiateurs tournés vers l'extérieur qui dissipent la chaleur grâce à leur forte émissivité dans l'infrarouge. La chaleur produite par les équipements situés à l'intérieur du satellite est évacuée par des caloducs vers des radiateurs montés sur les parois extérieures du satellite. Les antennes, panneaux solaires sont protégés sur le plan thermique par l'utilisation de matériaux et peintures isolantes.
Lorsque les instruments et les équipements ne fonctionnent pas des résistances chauffantes permettent de maintenir la température dans les plages prévues. Il peut être nécessaire de maintenir certains instruments à une température très basse : par exemple les bolomètres embarqués sur le télescope spatial Planck doivent être maintenus à une température de 0,1 kelvin
La gestion du bord
La gestion du bord pilote le fonctionnement du satellite. Elle regroupe les sous-systèmes suivants :
- la télémesure, la télécommande ;
- la surveillance et le contrôle du satellite ;
- le traitement des données.
Le système de télécommande et de télémesure prend en charge le dialogue avec le sol. Les fonctions de télécommande (sol ⇒ satellite) reçoivent et décodent les instructions ou données envoyées par le centre de contrôle et en assure la distribution aux autres sous-systèmes. Les fonctions de télémesures (satellite ⇒ sol) recueillent les données du satellite portant sur le fonctionnement du satellite, les données issues des instruments et après compression les transmettent au centre de contrôle lorsque les stations sont en visibilité.
Le système de contrôle du vol maintient la trajectoire et l'orientation du satellite. Ce système repose sur un logiciel qui utilise les données fournies par différents types de capteurs pour déterminer les écarts et effectue des corrections à l'aide d'actuateurs (orientation) et des moteurs généralement chimiques (trajectoire). Parmi les autres fonctions prises en charge par la gestion du bord :
- la surveillance du fonctionnement du satellite, la détection des pannes éventuelles, la réalisation de diagnostics et l’activation de solutions de contournement ;
- la vérification du respect des contraintes thermiques ;
- la synchronisation temporelle des différents sous-systèmes ;
- le déclenchement des taches programmées au niveau de la charge utile (prises d'image ciblées…).
Une partie de ces fonctions peut être réalisée soit depuis les stations au sol soit confiée aux automatismes du satellite.
Les données recueillies par les instruments sont stockées dans des mémoires de masse en attendant leur transfert vers les stations lors du survol d'une antenne de réception. Les communications internes du satellite sont réalisées via un bus. Le flux de données transmis doit être préservé des erreurs qui peuvent être provoquées par les particules chargées qui bombardent le satellite.
Le système de propulsion
|
Le système de propulsion du satellite remplit plusieurs missions :
- il assure le transfert du satellite depuis son orbite d'injection vers son orbite définitive ;
- dans le cas d'un satellite lancé vers une planète autre que la Terre, le système de propulsion peut également assurer l'injection sur une trajectoire interplanétaire.
Une fois le satellite à poste :
- il corrige les modifications de l'orbite induites par les perturbations naturelles (traînée atmosphérique, irrégularités du champ de gravité…) ;
- il corrige l'attitude (orientation) du satellite si son maintien n'est pas réalisé par un autre dispositif ;
- il permet les changements d'orbite prévus dans le cadre de la mission de certains satellites scientifiques.
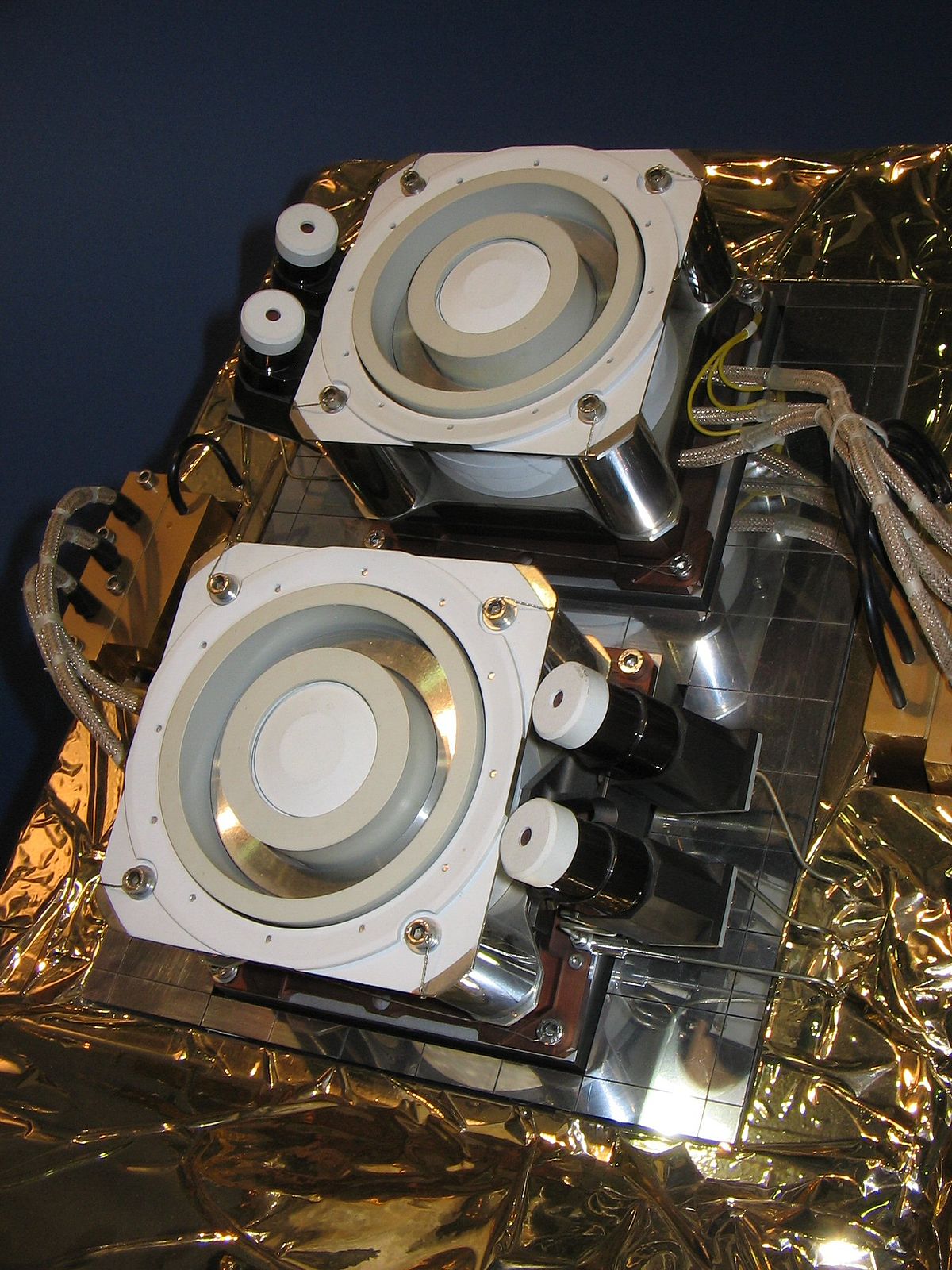
Compte tenu de la diversité des rôles assurés par la propulsion, il existe souvent deux types de moteurs fusées sur un satellite : l'un, plus puissant, prend en charge les manœuvres les plus importantes, l'autre plus précis mais de poussée plus faible intervient pour les corrections fines. Par ailleurs les satellites de télécommunications comportent généralement un moteur d'apogée dont le seul rôle est de fournir une vitesse de 1 500 m/s pour circulariser l'orbite à 36 000 km d'altitude lors de la mise à poste.
La masse du système de propulsion (ergols, propulseurs, réservoirs…) varie beaucoup selon le type de satellite. Dans un satellite géostationnaire de télécommunications d'une durée de vie de 15 ans, le poids des ergols (sans le système propulsif lui-même) peut représenter plus de 50 % de la masse du satellite tandis que sur un satellite d'observation comme Spot 4 ces mêmes ergols représentent environ 7 % de la masse.
Les poussées nécessaires varient de quelques millinewtons (actions de correction) à quelques centaines de newtons (Pour mémoire, 1 N permet de communiquer une accélération 1 m/s2 à une masse de 1 kg) si le transfert sur l'orbite définitive est pris en charge par le satellite. Quatre types de propulsion existent, caractérisés par des impulsions spécifiques (l'impulsion spécifique mesure l'efficacité d'un moteur-fusée : il fournit en secondes la durée durant laquelle 1 kilogramme de propergol produit une poussée de 1 kilogramme-force) et des poussées sensiblement différentes. Toutes ces technologies reposent sur l'éjection de matière à grande vitesse :
- la propulsion à propergol solide fournit des poussées importantes. Son utilisation dans le domaine des faibles poussées est à l'étude. Ce type de moteur ne peut être rallumé. Elle est utilisée exclusivement pour l'injection sur l'orbite définitive ;
- la propulsion liquide : la combustion d'un ou deux ergols (diergols) génère des gaz qui sont expulsés à haute vitesse. La poussée obtenue peut être faible ou relativement forte et couvrir tous les besoins ;
- la propulsion à gaz froid : un gaz (généralement de l'azote) stocké dans des réservoirs à haute pression est détendu et expulsé avec une poussée pouvant atteindre quelques dizaines de newtons ;
- la propulsion électrique utilise l'énergie électrique fournie généralement par les panneaux solaires. La poussée et l'impulsion sont faibles avec des valeurs qui dépendent de la technologie utilisée (électrothermique, électrostatique, plasma). Cette technologie est en plein développement car elle permet des gains de poids grâce à sa meilleure efficacité.
Le contrôle de l'orientation
Les instruments du satellite, pour pouvoir fonctionner correctement, doivent être en permanence pointés avec une bonne précision : les satellites de télécommunications doivent diriger leur antenne émettrice vers une portion du sol terrestre bien précise tandis que les appareils de prise de vues des satellites d'observation doivent cadrer les zones à photographier figurant dans leurs instructions : pour les instruments d'un satellite d'observation de la série Spot qui doivent être pointés avec une précision inférieure à 1 km et compte tenu de son altitude, comprise entre 500 et 1 000 km, l'erreur d'orientation du satellite doit être inférieure à 0,1°. De plus, pour éviter de déformer l'image obtenue, il faut que la vitesse angulaire du satellite soit inférieure à 0,005°/s.
Or le satellite est soumis à des couples qui modifient son orientation : phénomènes naturels (pression de la radiation solaire, pression aérodynamique, couples créés par le champ magnétique ou le champ de gravité terrestre, etc.) ou résultant de déplacements de mécanismes du satellite (pointage d'instrument). Pour contrer les changements d'orientation (ou attitude) il existe plusieurs méthodes :
- par gradient de gravité : une masse est reliée par un mât au satellite ; l'axe passant par le mat est aligné sur la direction satellite-centre de la Terre. Les mouvements autour de cet axe sont amortis sous l'influence de la gravité. Ce système passif a été utilisé par les premiers satellites mais il est délaissé aujourd'hui par la majorité d'entre eux car la précision de l'orientation n'est que de quelques degrés ;
- en mettant le satellite en rotation autour de l'axe qui porte les instruments (le satellite est dit spinné). Le moment d'inertie créé limite les changements d'orientation. Ce système est encore utilisé en particulier par les satellites Météosat ;
- les systèmes précédents ne permettent de stabiliser l'orientation que sur 2 axes. La stabilisation 3 axes est aujourd'hui la méthode de stabilisation la plus utilisée. Il existe plusieurs procédés. Celui reposant sur une roue cinétique est utilisé par les satellites géostationnaires. Le système le plus courant met en œuvre trois volants d'inertie disposés selon les 3 axes du satellite et mis en mouvement grâce à l'énergie électrique fournie par les panneaux solaires. En augmentant ou diminuant la vitesse de la roue, on provoque un mouvement de rotation dans le sens inverse du satellite ce qui permet de corriger n'importe quelle erreur d'orientation. Si les corrections sont toujours effectuées dans le même sens la vitesse des roues a tendance à croître. Il faut alors « désaturer » (c'est-à-dire ralentir) la vitesse du volant ce qui peut être effectué à l'aide de barreaux magnétiques ou en utilisant les petits propulseurs du satellite. Une dernière méthode consiste à utiliser ces derniers mais le carburant consommé pour maintenir le satellite sur sa position raccourcit sa durée de vie. Aussi cette solution vient en complément lorsque la correction à apporter est importante par exemple à la suite d'un changement ou d'une correction d'orbite.
- La pression de la radiation solaire est souvent utilisée pour limiter les changements d'orientation sur les satellites de télécommunications.
Ces manœuvres sont déclenchées lorsque des modifications d'orientation supérieures à des valeurs fixées par le centre de contrôle sont détectées. L'orientation du satellite est déterminée en sommant tous les déplacements angulaires mesurés par des gyromètres placés sur les trois axes depuis que la dernière orientation correcte a été relevée. Les gyromètres et les accéléromètres accumulent à la longue des erreurs (dérive) et il faut recalculer (selon le cas toutes les quelques centaines de secondes, une fois par orbite) la position et l'orientation du satellite. Ce calcul est effectué en utilisant les données fournies par des capteurs qui utilisent comme repère, selon le satellite, le centre la Terre, le Soleil ou les étoiles les plus brillantes.

















































