Rover lunaire - Définition
La liste des auteurs de cet article est disponible ici.
Les caractéristiques du rover

Le Rover a une allure rustique, décevante par rapport au dessin des prototypes MOLAB : cela est dû à l'absence de cabine pressurisée mais également de tout carénage, article superflu en l'absence d'atmosphère et incompatible avec la chasse au poids qui a présidé à la conception du véhicule. La survie des passagers dans l'environnement hostile de la lune, est prise en charge pour une durée maximum de 7 heures par les combinaisons et le système de survie (PLSS) que les astronautes transportent sur leur dos.
Le rover a une masse à vide de 210 kg (poids de 2 060 N sur la Terre/342 N sur la Lune). À pleine charge sa masse passe à 700 kg (poids sur Terre : 6 867 N, sur la Lune de 1 141 N) avec une charge utile de 490 kg (4 807 N sur Terre, 799 N sur la surface lunaire) se décomposant en 363 kg pour les 2 astronautes et 172 kg pour les échantillons lunaires, l'outillage et divers équipements.
Bien qu'une redondance systématique permette au véhicule de fonctionner en cas de panne d'un de ses composants, la NASA a décidé que les astronautes doivent être capables de retourner au module lunaire à pied en cas de panne du rover. Aussi le rayon d'action du rover est limité à 10 km, cette distance diminuant au fur et mesure du déroulement de la mission et de l'épuisement des consommables vitaux contenu dans le scaphandre des astronautes.
Le châssis
Le châssis mesure 3,1 m de long pour un empattement de 2,3 m et une largeur de 1,8 m. La hauteur maximale est de 1,14 m et la garde au sol à pleine charge de 35 cm. Le châssis est réalisé en tubes d'alliage d'aluminium type 2219 soudés. Pour que le rover puisse être stocké dans l'espace restreint qui lui est dédié dans le module lunaire, les parties avant et arrière du châssis sont articulées et peuvent se replier sur la partie centrale, les roues étant alors couchées en diagonale.
La partie avant du rover reçoit les 2 batteries, les systèmes de communication et de navigation, les caméras ainsi que l'électronique de bord. Sur la partie arrière, prennent place les outils, les sacs à échantillons et les autres équipements scientifiques embarqués.
La partie centrale du rover comporte deux sièges pliables côte à côte en aluminium reposant sur un plancher constitué de panneaux en aluminium. Un appui-bras est monté entre les sièges, qui sont équipés de cale-pieds ajustables ainsi que d'une ceinture de sécurité en Velcro. Un tableau de bord et un manche à balai permettant de diriger le véhicule est situé devant les sièges à égale distance des 2 passagers.
Les organes de roulement
L'utilisation de pneumatiques expérimentée sur la brouette d'Apollo 14 par Goodyear n'avait pas été concluante; la brouette ayant tendance à rebondir. La conception des roues du Rover lunaire adopte une structure novatrice, œuvre du Dr Bekker et son équipe de General Motors, principal sous-traitant de Boeing sur le rover. Les principaux avantages de la conception retenue sont le faible poids et l'efficacité dans les conditions rencontrées sur la surface de la lune.
Les roues ont un diamètre extérieur de 81 cm de diamètre (32 pouces), et sont larges de 23 cm (9 pouces). Afin de réduire la masse, les jantes sont en titane et les enjoliveurs en aluminium. Pour permettre une progression plus facile sur la surface poudreuse de la lune, le pneu conventionnel est remplacé par un treillis métallique constitué de cordes à piano tressées. La résille est constituée de 800 fils d'acier zingués à haute résistance de 81,3 cm de long pour 0,8 mm de diamètre. Ils s'entrecroisent tous les 4,7 mm. Un contrôle aux rayons X est réalisé avant le montage de la résille. La bande de roulement de la roue est recouverte sur 50 % de sa surface par des plaquettes en titane rivetées sur la résille et dessinant des chevrons. Ces plaques permettent de mieux transmettre l'effort de traction.
Sous la résille, se trouve une deuxième enveloppe plus rigide de 64,8 cm de diamètre qui limite la déformation de l'enveloppe extérieure en cas de gros choc. Cette structure est constituée de 20 bandes cintrées en titane. Chaque roue pèse 5,4 kg et est conçue pour pouvoir rouler au moins 180 km. Chacune coûte 85 000 $.
Le système de suspension est élaboré pour absorber les irrégularités du relief lunaire : le châssis est rattaché à chaque roue par une suspension à double triangulation comportant un amortisseur hydraulique à huile pour limiter les mouvements verticaux. Chaque bras (triangle de suspension) est lié au châssis via une barre de torsion (2 barres de torsion par roue).
La motorisation
Le système de propulsion du rover lunaire utilise des moteurs électriques qui doivent satisfaire plusieurs contraintes : couple variable (couple élevé pour franchir les obstacles), vitesse variable (pour maximiser le temps consacré à l'exploration scientifique), rendement élevé pour limiter la consommation électrique et dynamique de freinage. En outre, ces moteurs doivent fonctionner dans le vide qui limite la dissipation de la chaleur.
Les quatre roues sont motrices : chaque roue est entraînée par un moteur électrique, développant une puissance de 0,25 ch (0,2 kW) associé à un réducteur de type « harmonic drive » de rapport 1/80. L'ensemble est scellé et rempli d'azote pour lutter contre l'échauffement dans le vide spatial. Un moteur peut être si nécessaire débrayé manuellement laissant la roue libre. Les trains arrière et avant sont tous deux orientables réduisant le rayon de braquage à 3 mètres. Un des trains peut être si nécessaire bloqué dans l'axe. Le braquage des roues est réalisé par de petits moteurs électriques de 0,1 ch placés par paire (pour assurer la redondance) sur chaque essieu et pilotés par un boîtier électronique (le DCE).
Les moteurs sont alimentés par deux batteries zinc-argent non rechargeables. Chacune pèse 27 kg, a une capacité de 121 A/h et délivre le courant sous une tension de 36 volts. Chaque batterie comporte 25 cellules en plexiglas placées dans un boîtier en magnésium : les plaques zinc/argent sont plongées dans une électrolyte à base d'hydroxyde de potassium. Les batteries peuvent être exploitées individuellement ou en parallèle. Une seule batterie est utilisée en opération et dispose d'une capacité suffisante pour alimenter les moteurs durant les trois excursions. La deuxième batterie est présente par sécurité. Les batteries alimentent également les différents boîtiers électroniques qui consomment environ 50 watts lorsque le véhicule est en marche.
La vitesse du rover est limitée à 14 km/h. Mais au cours de la mission Apollo 17, une vitesse de 17,7 km/h fut enregistrée sur les pentes de l'escarpement Lee-Lincoln. Sur le plat, la vitesse maximale est de 10 km/h. L'énergie stockée à bord du Rover lui permet de parcourir 90 km. En pratique, la distance maximale parcourue a été de 35 km durant la mission Apollo 17. Le rover peut gravir et descendre des pentes de 25 % et franchir à petite vitesse un obstacle de 30 cm ou une crevasse de 70 cm.

L'astronaute dispose pour piloter son véhicule d'un ensemble d'instruments et de commandes situé entre les deux sièges ce qui permet son utilisation par les deux passagers. Les contrôles permettent aux astronautes de diriger leur véhicule, connaître leur position et leur cap (fonction de navigation) et surveiller les principaux paramètres du rover.
Les commandes et le tableau de bord
Le véhicule ne possède pas de volant : il se conduit grâce à un manche à balai en forme de T, plus commode à utiliser avec des mains gantées. L'astronaute fait avancer le LRV en poussant le manche vers l'avant, la vitesse étant proportionnelle à l'inclinaison de celui-ci. En inclinant le manche à gauche ou à droite, le conducteur fait tourner le véhicule. Le freinage s'enclenche lorsque le pilote tire le manche vers l'arrière : ce mouvement a pour effet d'inverser le sens de rotation des moteurs électriques puis, lorsque le manche est en butée, de serrer le frein de parking (frein à tambour sur chaque roue) qui peut retenir le véhicule sur une pente de 35 %. Un bouton situé sur le manche permet de passer en marche arrière c'est-à-dire d'inverser l'action du manche.
Un tableau de bord placé devant le manche restitue les principales informations permettant de contrôler la navigation et le fonctionnement du véhicule. Les données fournies sont la vitesse du rover (mesurée par un odomètre située sur la roue droite), la distance parcourue (précision de 100 mètres), la pente et le dévers, le cap suivi (sur une rose graduée de 5° en 5°), la position du module lunaire - relèvement (en degré) et distance (précision de 100 mètres) -, le tension et la charge restante des batteries, la température des batteries et des moteurs électriques de traction. Des commandes sous forme d'interrupteur permettent de mettre le contact, choisir les batteries utilisées, réinitialiser le système de navigation, régler le gyroscope directionnel, activer/désactiver le moteur de traction de chaque roue, activer/désactiver les moteurs permettant de braquer les essieux avant et arrière. Les contrôles relatifs à la navigation sont regroupés dans la partie supérieure du tableau de bord et ceux relatifs au contrôle de la charge des batteries et des températures sont situés dans la partie inférieure.
Les astronautes grâce à ce tableau de commandes peuvent faire face aux pannes majeures : passer d'une batterie à l'autre, etc.
S'orienter sur la Lune est plus difficile que sur Terre car l'absence de magnétisme naturel ne permet pas d'avoir recours à une boussole ou un compas ; de plus la taille réduite de la Lune rapproche l'horizon qui se situe à environ 3 km en terrain plat. Aussi le rover est doté d'un système de navigation relativement sophistiqué.
Celui-ci remplit 2 fonctions : il fournit en permanence la position du Module Lunaire par rapport au rover en indiquant sa distance et sa direction (cap) et par ailleurs il permet aux astronautes de se diriger en fournissant le cap suivi (par rapport au nord lunaire) et la distance parcourue. Toutes ces données sont affichées sur le tableau de bord.
Ces informations sont calculées par un petit ordinateur embarqué, le SPU, alimenté en données par un gyroscope (DG), qui fournit une direction de référence et 4 odomètres placés sur chaque roue qui mesurent la distance parcourue. Au début d'une excursion les occupants du véhicule alignent le gyroscope par une procédure qu'ils peuvent répéter en cours d'excursion en cas de dérive de l'instrument : à cet effet les astronautes utilisent un gnomon qui fournit une mesure de l'azimut du soleil.
Durant la phase de conception du rover une étude fut menée pour mesurer le risque couru par l'équipage en cas de mauvais fonctionnement du système de navigation qui concluait à son caractère non critique : avec un rayon d'action limité à 10 km de leur point de départ, un Lem culminant à près de 6 mètres, et le recours possible à une carte détaillée des reliefs il était peu probable que les astronautes aient du mal à retrouver leur base. Aussi le cahier des charges du système demandait une précision de 700 mètres en fin d'excursion. La précision obtenue sur le terrain fut de 100 mètres sans réalignement intermédiaire du gyroscope.
Les systèmes de communication
Le rover dispose d'un système de télécommunication permettant aux occupants du rover de dialoguer entre eux ainsi qu'avec la station de contrôle à terre. Des mesures télémétriques, permettant d'effectuer un diagnostic en cas de panne, sont également transmises automatiquement et directement à la station de contrôle. Le rover est également équipé d'une caméra de télévision utilisable à l'arrêt et d'une caméra 8 mm.
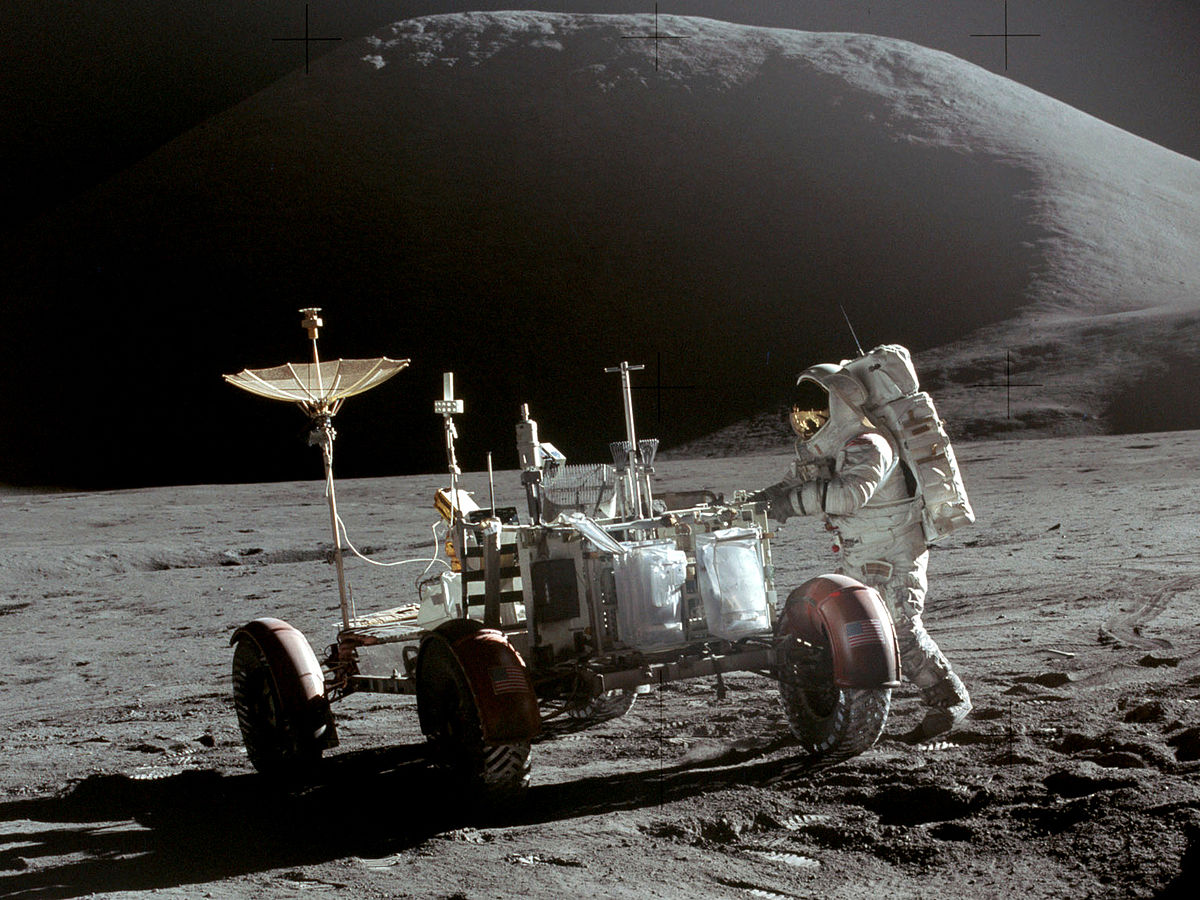
La caméra de télévision couleur, installée à l'avant du véhicules, permet aux astronautes de transmettre à l'arrêt des images en temps réel : elle peut être contrôlée à distance depuis la terre. Les contrôleurs de mission ainsi que les scientifiques sur la terre peuvent ainsi assister les cosmonautes dans leur exploration du sol lunaire. L'image est transmise par une antenne à grand gain en forme de parapluie montée sur un mât situé sur l'avant du châssis ; celle-ci doit être réorientée à chaque arrêt par les astronautes vers la terre. Une antenne à petit gain, placée à portée de main des passagers comme la caméra 8 mm prend en charge la transmission des communications. Elle peut être orientée quand le véhicule est en marche. Toutes les télécommunications sont gérées par un boîtier électronique disposant de sa propre batterie placée à l'avant du véhicule.
C'est la première fois qu'une caméra couleur est embarquée dans une expédition lunaire. La caméra CCD (charge coupled device) permet de transmettre des images dans les conditions de luminosité extrêmes qui caractérisent l'environnement lunaire. (Durant la mission Apollo 12, la caméra fut pointée accidentellement vers le Soleil, ce qui la rendit inutilisable pour la suite de la mission). Son poids n'excède pas les 4,5 kg. Sa résolution atteint les 400 000 pixels. Sa consommation réduite de 13 watts, ses dimensions compactes (101 mm de haut, 165 mm de large et 418 mm de long) et sa robustesse ont permis de l'embarquer à bord du rover. L'objectif, à focale variable, est par ailleurs réglable (de 1 220 mm à 460 mm). Le signal est transmis au format NTSC (60 hertz et 525 lignes). La lumière qui frappe l'objectif traverse une série de filtres, qui la décompose en 3 images correspondant aux couleurs fondamentales (rouge, vert et bleu), qui sont enregistrées séparément. Sur Terre les images monochromes sont recombinées, pour reconstituer une image en couleur compatible avec les standards des réseaux de télévision commerciaux.
Tous les rovers sont abandonnés en fin de mission sur la Lune, non loin du site d'atterrissage et font partie des objets artificiels sur la Lune :
| Mission | Année | Coordonnées géographiques |
|---|---|---|
| Apollo 15 | 1971 | |
| Apollo 16 | 1972 | |
| Apollo 17 | 1972 |
Lors de la mission 17 d'Apollo, grâce au système de téléguidage à distance, la caméra permit au monde entier d'assister, en direct, au décollage du module lunaire qui ramenait les astronautes sur la terre.
Le contrôle thermique
La Lune connaît des températures extrêmes le jour comme la nuit : les températures au sol culminent à 130 °C (-130 °C durant la nuit). Or de nombreux composants du véhicule ne peuvent fonctionner que dans une plage de températures bien précise : les batteries, par exemple, ne peuvent être utilisées que si leur température est comprise entre 4 à 52 °C. Toutefois pour bénéficier de températures plus clémentes les missions Apollo étaient toutes programmées au début de la période éclairée (longue de 354 heures terriennes) : ainsi la température maximum que la mission Apollo 17 dut subir est de 83 °C.
Sur la Lune l’absence d’atmosphère ne permet pas d’avoir recours à des systèmes de ventilation classiques. Pour que le rover reste opérationnel, des dispositifs thermiques passifs et semi passifs sont installés sur les organes les plus sensibles : ceux-ci doivent, en particulier, maintenir la température des batteries et des équipements électroniques (gyroscope (DGU), ordinateur de navigation (SPU), boîtier de commande de la direction (DCE)) situés à l’avant du véhicule, limiter l’échauffement du tableau de bord et éviter que l’équipage soit en contact avec des parties du rover porté à des températures trop élevées.
Les composants électroniques et les batteries, organes les plus sensibles, sont enveloppés dans un isolant, composé de 15 couches de mylar aluminisé intercalées avec 14 couches de nylon. L'excès de chaleur du DGU et SPU est transféré par un pont thermique aux batteries qui sont utilisées comme puits thermique. Lorsque la température excède les 45 °C, la chaleur est absorbée par des blocs de paraffine (2 kg en tout) en les faisant fondre.
Des radiateurs situés sur les batteries et sur le DCE, couverts et donc inopérants durant les excursions pour les protéger de la poussière, sont activés (la protection est relevée manuellement) à l'issue des sorties pour dissiper la chaleur par rayonnement. Dès que la chaleur s'est dissipée les protections se remettent automatiquement en place pour éviter une diminution trop importante de la température.
La protection thermique des autres parties du rover est réalisée par l'anodisation de certaines pièces métalliques (poignées, repose-pieds, sections tubulaires des sièges, et panneaux centraux et arrière du plancher), l'utilisation de peintures spéciales (tableau de bord), etc.
Sur le terrain, l'action des radiateurs fut fortement contrariée par l'omniprésence de la poussière lunaire qui réduisit et même dans un cas annula complètement la dissipation attendue de l'excès de chaleur entre deux sorties. Au cours d'une excursion de l'équipage d'Apollo 17, le conducteur dut changer de batterie à cause d'une montée en température trop rapide de la batterie utilisée.
Le transport et le déploiement sur la lune

Le Rover lunaire devait pouvoir être logé dans une des baies aux dimensions réduites de l'étage de descente du Lunar Module (LM) du vaisseau Apollo.
La jeep lunaire, occupe un espace de 0,85 m³ situé à droite de l'échelle de descente du Lem : le rover est stocké sur une palette en position verticale le nez en bas dans la baie ; les parties avant et arrière du châssis sont repliées, les roues sont à l'horizontale et les sièges ainsi que les repose-pieds sont rabattus. Grâce à un système de ressorts de barre de torsion et de loquets, il peut être déplié par un seul astronaute qui utilise pour la manœuvre deux rubans de nylon passant par des poulies ; le déploiement est freiné à l'aide de cordes et de bandes de tissu. La procédure est la suivante : un astronaute monte à l'échelle jusqu'au niveau du sas du Lem et déverrouille à l'aide d'un levier le Rover ; le deuxième astronaute situé au sol déclenche ensuite le dépliement pratiquement automatique du rover en tirant sur des rubans de nylon en plusieurs étapes. Le rover est d'abord partiellement incliné ; la partie arrière du châssis et les roues arrière sont déployées puis le rover est incliné jusqu'à ce que sa partie arrière touche le sol ; le déploiement des roues et du châssis avant est alors déclenché puis le reste du rover est abaissé jusqu'au sol. L'astronaute déploie les sièges et les repose-pieds sont dépliés. Enfin les équipements de communication (caméras, antennes et boîtier électronique), stockés dans une autre baie sont montés sur le rover.

















































