Module lunaire Apollo - Définition
La liste des auteurs de cet article est disponible ici.
Les caractéristiques du module lunaire
Le module lunaire comporte deux étages : un étage de descente permet d'atterrir sur la Lune. Cet étage sert de plate-forme de lancement à l'étage de remontée qui ramène les astronautes au vaisseau Apollo en orbite à la fin de leur séjour sur la Lune. La structure du module lunaire est, pour l'essentiel, réalisée avec un alliage d'aluminium choisi pour sa légèreté. Les pièces sont généralement soudées entre elles mais parfois également rivetées.
L'étage de descente
Le corps de l'étage de descente, qui pèse plus de 10 tonnes, a la forme d'une boîte octogonale d'un diamètre de 4,12 mètres et d'une hauteur de 1,65 mètres. Sa structure, constituée de deux paires de panneaux parallèles assemblés en croix, délimite cinq compartiments carrés (dont un central) et quatre compartiments triangulaires. Le corps de l'étage est enveloppé dans plusieurs pellicules de matériaux servant d'isolant thermique. Cette protection est renforcée près de la tuyère du moteur de descente.
La fonction principale de l'étage de descente est d'amener le LEM sur la Lune. À cet effet, l'étage dispose d'un moteur fusée à la fois orientable et à poussée variable. La modulation de la poussée permet d'optimiser la trajectoire de descente mais surtout de poser en douceur le LEM qui s'est fortement allégé en consommant ses ergols. Le comburant - du peroxyde d'azote (5 tonnes) - et le carburant - de l'aérozine 50 (3 tonnes) - sont stockés dans quatre réservoirs placés dans les compartiments carrés situés aux 4 coins de la structure. Le moteur se trouve dans le compartiment carré central.
Le deuxième rôle de l'étage de descente est de transporter tous les équipements et consommables qui peuvent être abandonnés sur la Lune à la fin du séjour, ce qui permet de limiter le poids de l'étage de remontée. Les 4 compartiments triangulaires délimités par la structure octogonale reçoivent :
- Les consommables utilisés durant la phase de descente et le séjour sur la Lune (oxygène, eau, batteries électriques) ;
- Les équipements scientifiques : les équipements embarqués dépendent des missions mais comprennent toujours au moins un ensemble ALSEP (Apollo Lunar Surface Experiments Package) qui regroupe des instruments qui partagent la même source d'énergie (un générateur thermoélectrique à radioisotope) et un système de télécommunications qui communique les données collectées au centre de contrôle sur Terre. Parmi les instruments on trouve sismomètre, magnétomètre, spectromètre, station météorologique, collecteurs de particules, ...
- Les outils : marteau, foreuse, ...
- Les véhicules lunaires : brouette pour Apollo 14 puis rover lunaire à partir d'Apollo 15.
Le train d'atterrissage
Pour se poser sur un sol lunaire, dont la consistance est mal connue au moment de la conception du LEM, l'étage de descente dispose d'un train d'atterrissage comportant 4 jambes largement écartées pour procurer la meilleure stabilité à l'atterrissage. Chaque jambe se termine par une semelle d'un diamètre de 94 cm qui doit limiter l'enfoncement du LEM même dans un sol très meuble. Des structures en nid d'abeille, situées au niveau des jambes et des semelles, s'écrasent au moment de la prise de contact avec le sol et jouent ainsi le rôle d'amortisseur : le train d'atterrissage est conçu pour supporter une vitesse horizontale de 1,22 m/s et une vitesse verticale de 2,43 m/s (3 m/s si la vitesse horizontale est nulle). La semelle de chaque pied est prolongée vers le bas par une tige longue de 1,50 mètre qui, au moment du contact avec le sol, allume un voyant sur le tableau de bord ce qui doit donner le temps au pilote d'éteindre le moteur avant le contact avec le sol. Le train d'atterrissage, stocké en position repliée au départ, est déployé lorsque le LEM est mis en orbite autour de la Lune.
L'étage de remontée
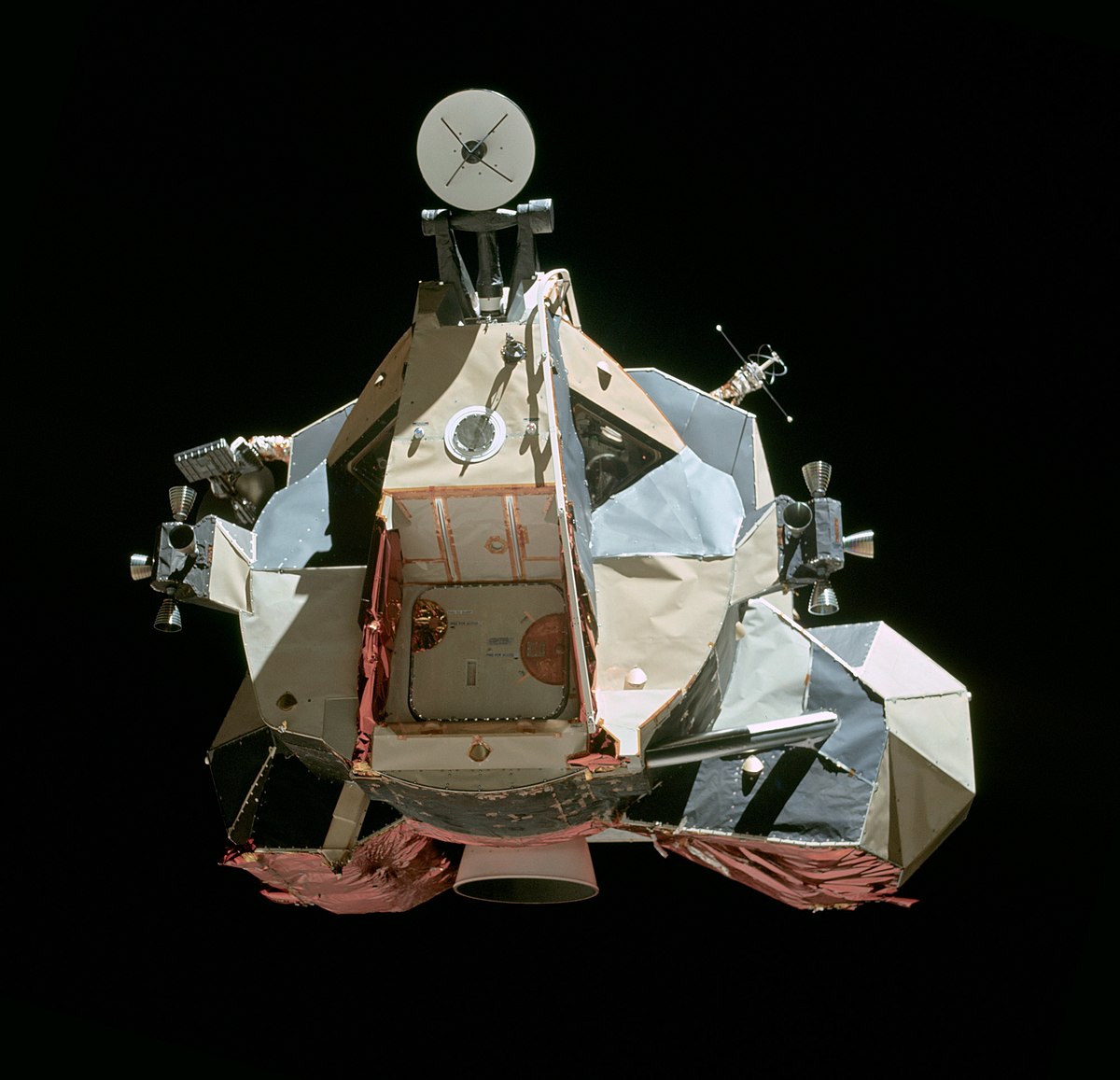
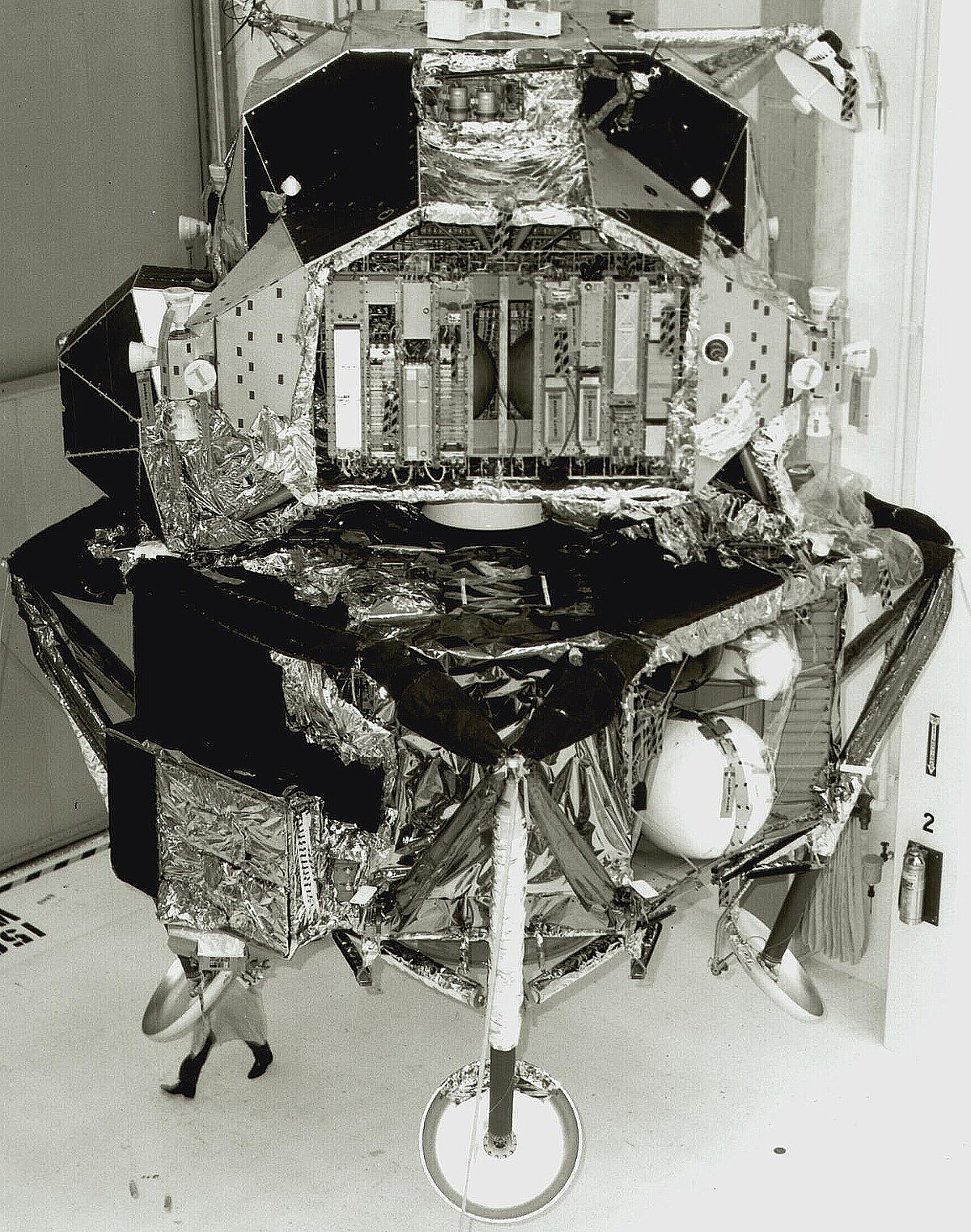
L'étage de remontée pèse environ 4,5 tonnes. Sa forme complexe, qui résulte d'une optimisation de l'espace occupé, lui donne l'allure d'une tête d'insecte. Il est essentiellement composé de la cabine pressurisée qui héberge deux astronautes dans un volume de 4,5 m3 et du moteur de remontée avec ses réservoirs d'ergols.
Les moteurs
La trajectoire de retour vers le module de commande étant beaucoup plus simple, la poussée du moteur est constante. Les ergols (910 kg de peroxyde d'azote et 1,4 tonnes d'aérozine 50) sont stockés chacun dans un unique réservoir mis sous pression par de l'hélium. L'architecture générale de l'étage est conçue de manière à ce que le centre de masse et le centre de poussée du moteur soient très proches (moins d'un mètre) : le moteur est placé très haut (le sommet dépasse dans la cabine) et les réservoirs sont placés de part et d'autre de la cabine. Cette disposition limite le couple à exercer pour maintenir l'étage dans la direction voulue durant la phase propulsée. Le moteur n'est pas orientable et les corrections sont réalisées par des moteurs d'attitude (RCS Reaction Control System) de 45 kg de poussée regroupés en quatre grappes de quatre moteurs, situées à chaque angle de l'étage, et dont les actions combinées permettent d'agir selon les trois axes de lacet, de tangage et de roulis. Pour maximiser leur efficacité, ils sont écartés au maximum de l'axe de la poussée du moteur principal.
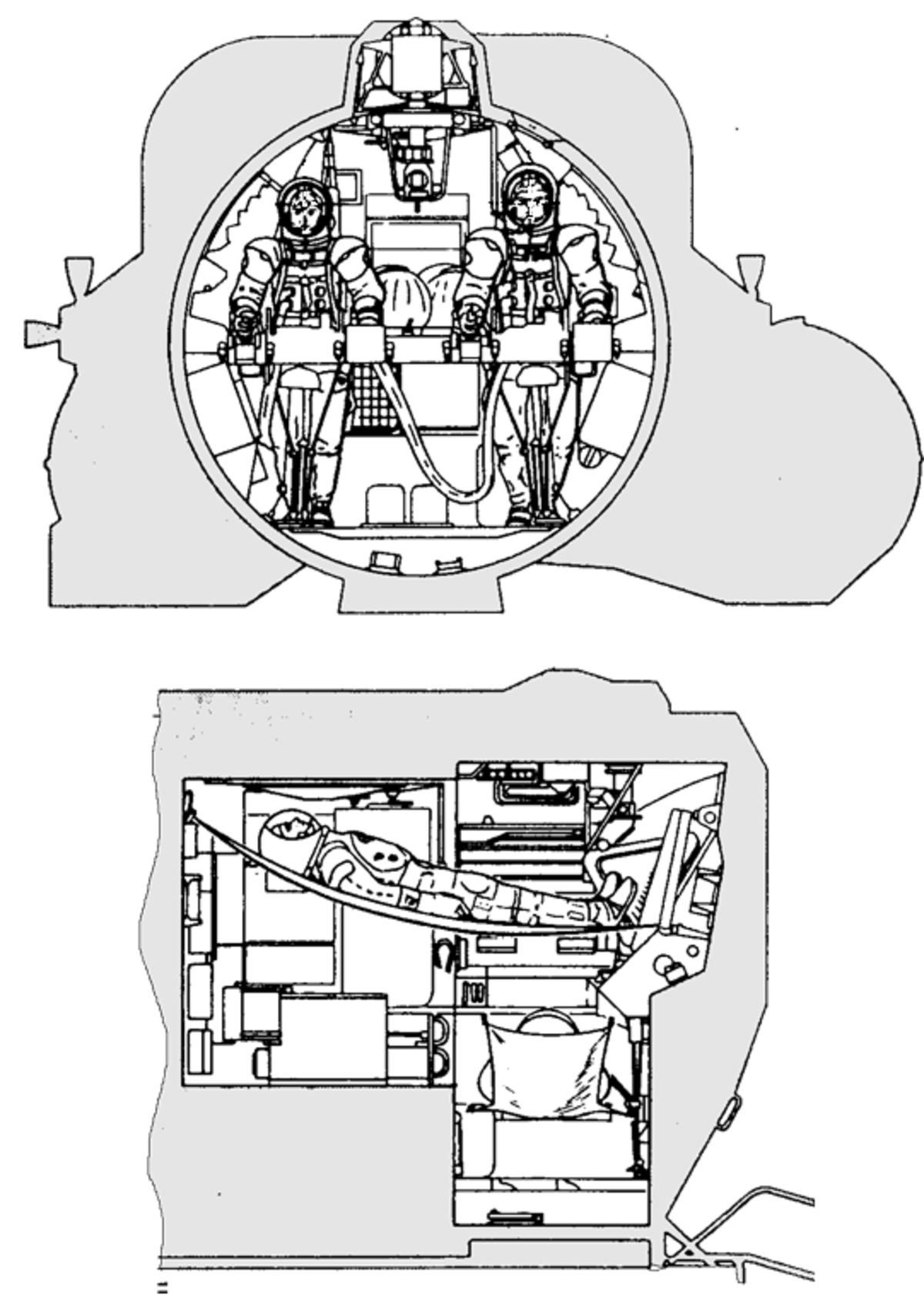
La cabine pressurisée
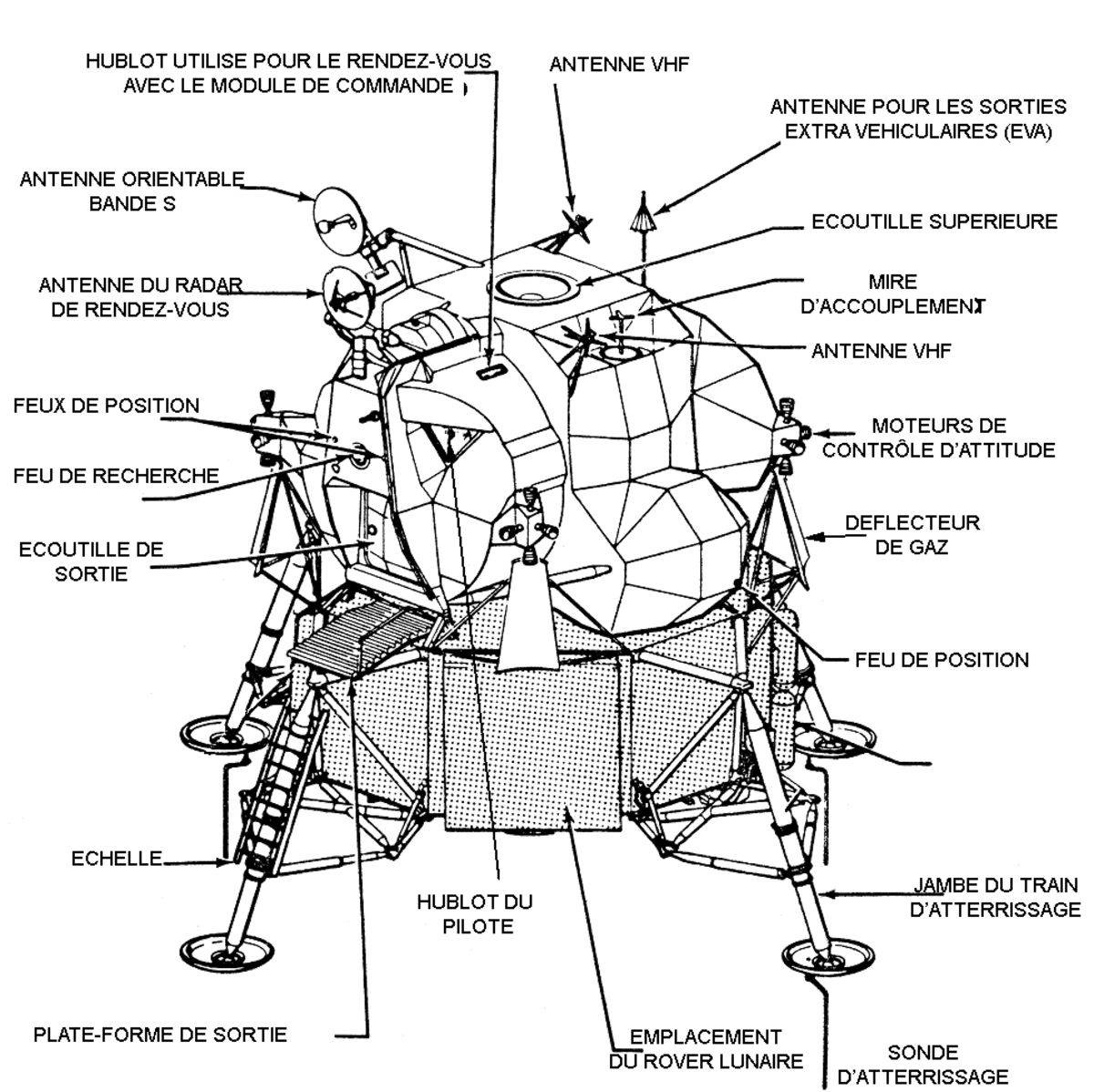
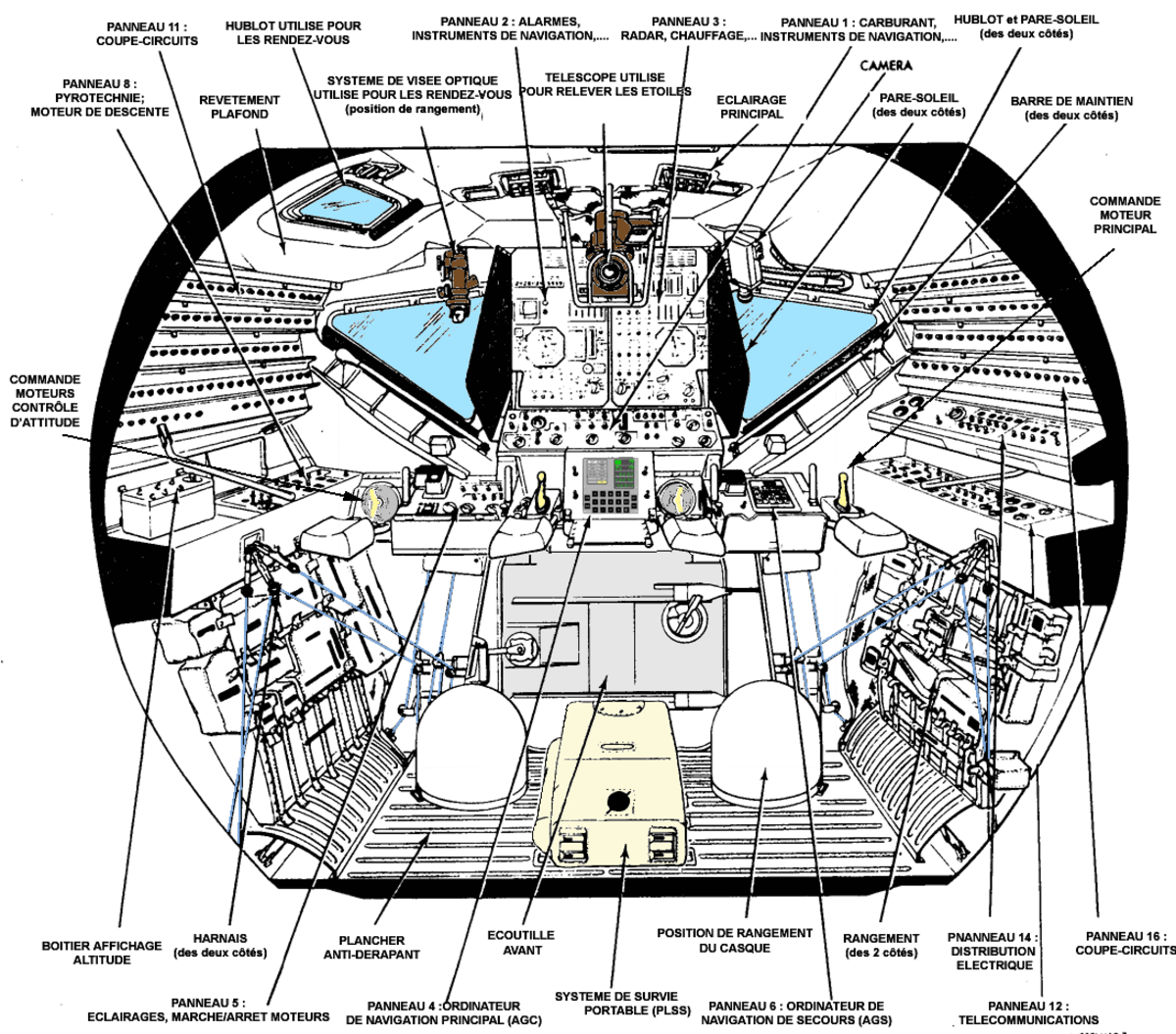
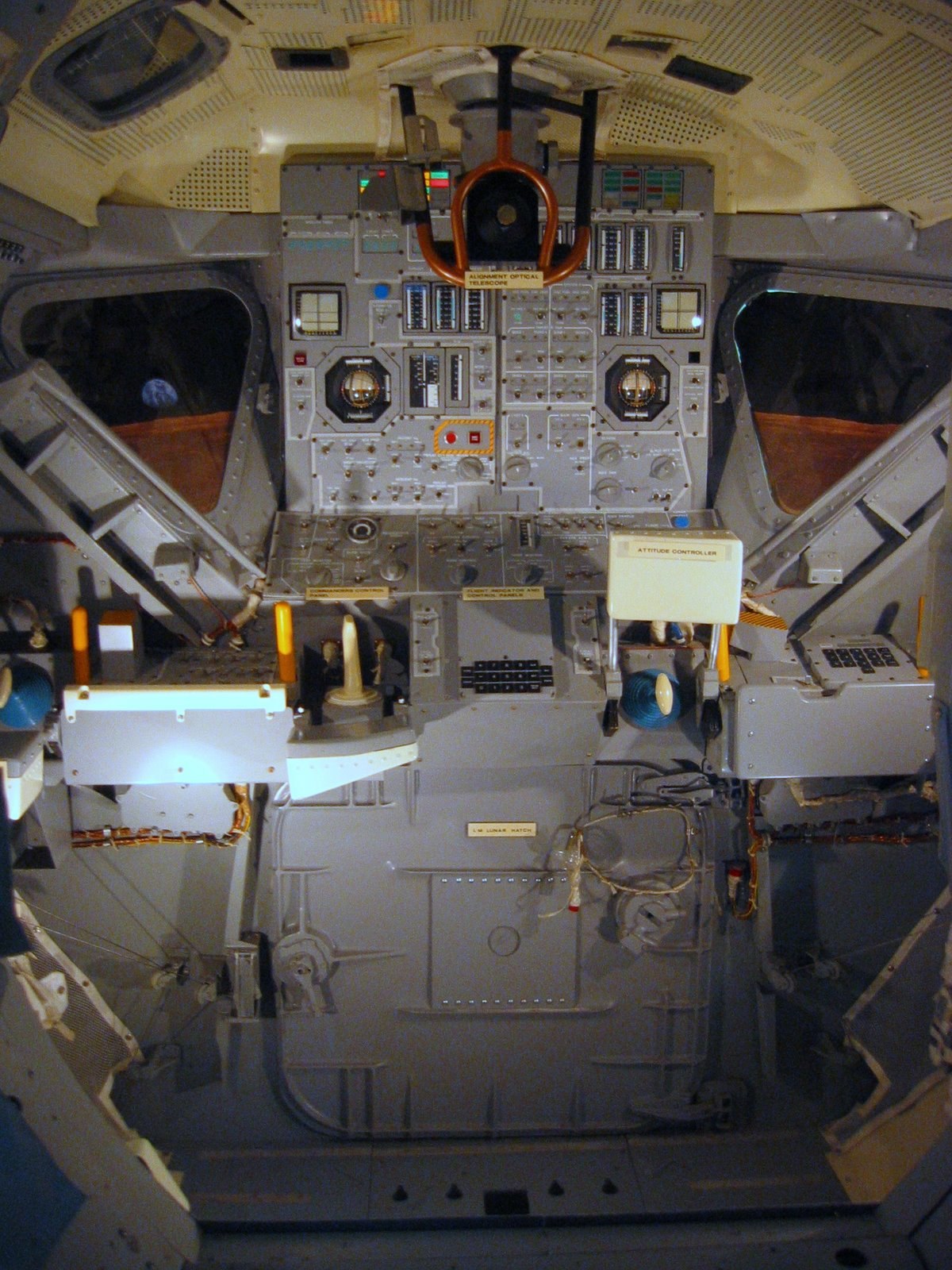
La partie avant de la cabine pressurisée occupe la plus grande partie d'un cylindre de 2,34 mètres de diamètre et de 1,07 mètres de profondeur. C'est là que se tient l'équipage lorsqu'il n'est pas en excursion sur la Lune. Le pilote (à gauche face à l'avant) et le commandant de bord sont debout, tenus par des harnais qui les maintiennent en place en impesanteur et durant les phases d'accélération. Sur la cloison avant, chaque astronaute a devant lui un petit hublot triangulaire (0,18 m2) incliné vers le bas, qui lui permet d'observer le sol lunaire avec un bon angle de vision, ainsi que les principales commandes de vol et cadrans de contrôle regroupés par panneaux généralement dédiés à un sous-système. Les commandes et contrôles communs sont placés entre les deux astronautes (par exemple la console d'accès à l'ordinateur de navigation), certaines commandes sont doublées (commandes pilotant l'orientation et la poussée des moteurs), les autres commandes sont réparties en fonction des tâches assignées à chaque astronaute. Les panneaux de commandes et coupe-circuits se prolongent sur les parois latérales situées de part et d'autre des astronautes. Le pilote a au-dessus de sa tête un petit hublot (0,07 m2) qui lui permet de contrôler la manœuvre de rendez-vous avec le module de commande. En haut du panneau central situé face aux astronautes se trouve le télescope utilisé pour faire le point avec les astres, et au ras du plancher, l'écoutille de forme carrée (96 x 96 cm) qui est utilisée pour descendre sur le sol lunaire.
L'arrière de la cabine pressurisée est beaucoup plus exigu (1,37 x 1,42 m pour 1,52 m de haut) : son plancher est plus haut de 48 cm et, de plus, encombré par un capot recouvrant le sommet du moteur de remontée. Les parois latérales sont occupées par les rangements et à gauche par une partie du système de contrôle environnemental. Dans cette niche les astronautes rangent le deuxième système de survie portable (le premier se trouve couché sur le plancher de la cabine avant entre les 2 astronautes), la nourriture, les scaphandres de sortie avec les bottes et les casques, les sacs de déchets corporels, ... Derrière la cloison arrière se situe un compartiment non pressurisé dans lequel est logée une grande partie des composants électriques et électroniques. Au plafond, se trouve l'écoutille utilisée pour passer dans le Module de Commande : derrière cette porte, on trouve un tunnel court (80 cm de diamètre pour 46 cm de long) comportant un système de verrouillage utilisé pour solidariser les deux vaisseaux. Les forces en jeu au moment de l'accostage qui pourraient déformer le tunnel sont amorties par des poutres qui les répercutent sur toute la structure.
Les panneaux de commande comportent environ 170 interrupteurs, en majorité à deux ou trois positions, répartis entre plusieurs panneaux de contrôle et plus de 80 afficheurs dont plus de vingt fournissant des informations quantifiées (quatre afficheurs numériques, dix-huit indicateurs à aiguille, ...). L'électroluminescence, une technologie alors balbutiante, est utilisée pour éclairer les tableaux de commande et de contrôle : les voyants sont plus lisibles et la consommation électrique est diminuée.
Le LEM ne dispose pas de sas, qui aurait ajouté trop de poids. Pour descendre sur le sol lunaire, les astronautes font le vide dans la cabine et, à leur retour, ils pressurisent la cabine avec les réserves d'oxygène. Pour descendre, ils se glissent dans l'écoutille : celle-ci donne sur une petite plate-forme horizontale qui débouche sur l'échelle dont les barreaux sont situés de part et d'autre d'une des jambes de l'étage de descente.
Le Module Lunaire embarque deux systèmes qui réalisent la navigation (le calcul de la position et la définition de la trajectoire) et le pilotage (la gestion des commandes de vol conformément à la trajectoire retenue) du module lunaire. Chacun de ces systèmes repose sur un ordinateur : ce sont le Lem Guidance Computer (LGC) et l'Abort Guidance System (AGS). Ce dernier est mis en œuvre en cas de défaillance du LGC.
Le LGC est un ordinateur effectuant des traitements en temps réel. Il est multitâche (jusqu'à 8 tâches exécutées en parallèle). La mémoire utilise des mots de 16 bits : elle est composée de 64 ko (32 000 mots) de mémoire morte contenant l'ensemble des programmes et de 4 ko (2 000 mots) de mémoire vive (effaçable) utilisée par les traitements. Les deux types de mémoire sont constitués de tores magnétiques : les programmes sont implantés dans l'ordinateur à la fabrication. Le processeur, est constitué d'environ 5 000 portes NOR réalisées à l'aide de circuits intégrés. Il pèse environ 35 kg.
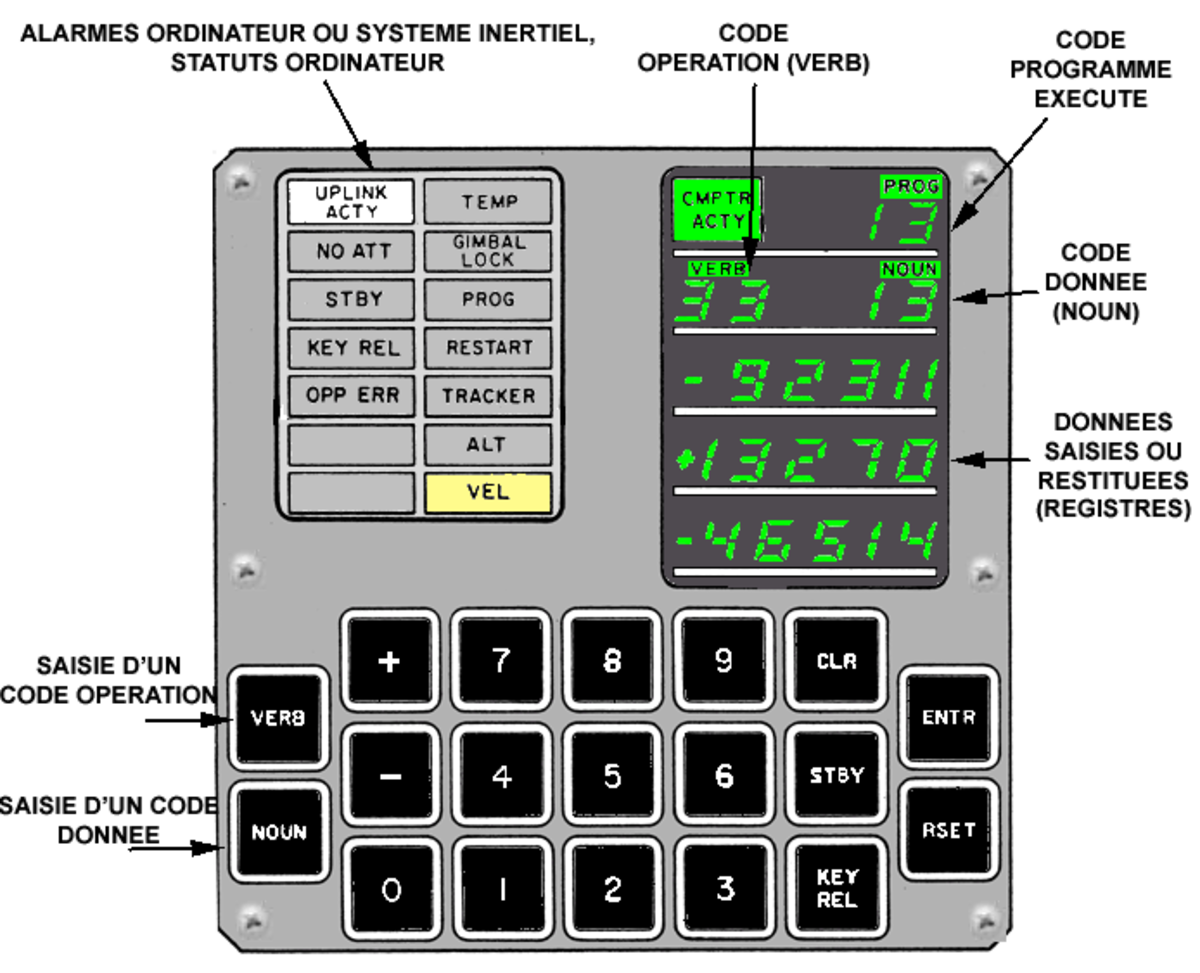
Le LGC reçoit ses principales informations du système inertiel (IMU) ainsi que des deux radars lorsque ceux-ci sont activés. Utilisant des programmes de navigation dédiés à chaque phase de la mission, il est capable de piloter en direction et en poussée les deux moteurs principaux ainsi que les 16 moteurs d'orientation pour que LEM suive la trajectoire qui a été calculée. Les astronautes utilisent une console (DSKY) pour entrer des instructions : lancement de programme de navigation, demande d'information, réinitialisation de la position, saisie des paramètres de vol à exécuter, etc.
Le système inertiel doit être régulièrement recalé en effectuant un relevé de la position du LEM dans l'espace. À cet effet les astronautes disposent du télescope optique d'alignement (Alignment Optical Telescop AOT). Cet instrument permet relever la position des étoiles et est interfacé avec l'ordinateur embarqué. Deux méthodes peuvent être utilisées. Lorsque le LEM navigue seul, l'astronaute entre une référence d'étoile dans l'ordinateur : celui-ci fait alors pivoter avec ses moteurs d'orientation le vaisseau de manière à ce que l'étoile passe devant l'optique du télescope). L'étoile va successivement couper l'abscisse et l'ordonnée d'un réticule qui s'affiche dans l'optique. L'astronaute signale à l'ordinateur au moyen de deux boutons situés sur la monture du télescope le moment où les deux lignes sont successivement coupées. En relevant la position de deux étoiles, l'ordinateur peut recalculer la position du LEM et si besoin recaler la centrale inertielle. Lorsque le LEM ne peut pas pivoter librement — lorsqu'il est posé sur la Lune ou lorsqu'il est accouplé au module de commande —, l'astronaute fait pivoter le réticule de manière à recouper les deux lignes d'un réticule dédié. Il relève à chaque fois l'angle que fait le réticule puis saisit les informations dans l'ordinateur.
Le module lunaire dispose par ailleurs de deux radars :
- Le radar de rendez-vous (Rendezvous Radar) est utilisé pour la manœuvre de rendez-vous avec le Module de Commande après sa remontée depuis la Lune et sa mise en orbite basse. Un transpondeur radar embarqué à bord du module de commande envoie un signal en réponse à l'émission du radar qui est analysé et fournit la distance, la vitesse et l'angle que forme le vaisseau cible avec l'axe du LEM. Le radar a une portée nominale de 75 km. L'antenne du radar peut être pointée manuellement vers la cible par un astronaute. Elle peut être également maintenue pointée vers la cible par un système automatique dédié autonome (qui comprend un gyroscope) ou par l'ordinateur de bord. À partir du moment où le radar a accroché le transpondeur, la distance, la vitesse relative et le gisement (angle en abscisse et ordonnée) du module de commande sont affichés sur le tableau de bord.
- Le radar d'atterrissage (Lunar Radar) détermine l'altitude au-dessus du sol lunaire et la vitesse de défilement du LEM par rapport au sol. Il est installé sur l'étage de descente. Le radar est activé lorsque le vaisseau est descendu à moins de 15 km d'altitude mais ses données ne sont utilisées par l'ordinateur de navigation qu'à partir de l'altitude de 12 km. L'antenne du radar a deux positions pour pouvoir fonctionner lorsque le LEM est en phase de freinage (l'axe vertical du LEM est alors parallèle au sol lunaire) et en phase d'approche finale (axe vertical du LEM plus ou moins perpendiculaire au sol lunaire). À l'atterrissage, lorsque le sol est à moins de 15 mètres, en l'absence de vitesse horizontale, il ne peut plus fournir d'information valable : l'ordinateur utilise alors les données fournies par le gyroscope. Les données du radar sont affichées sur le tableau de bord.
Au cours des deux manœuvres de rendez-vous, au moment de l'approche finale, le pilote doit aligner exactement le module lunaire selon les trois axes avec le module de Commande. À cet effet il dispose d'un système de visée optique (le COAS Crewman Optical Alignment Sight). Cet instrument est monté sur le hublot supérieur destiné à la manœuvre. Il projette un réticule que le pilote doit superposer avec la cible située sur le Module de Commande.
Pour se signaler durant les manœuvres de rendez-vous avec le module de Commande, le LEM a des feux de position visibles à plus de 300 mètres : les conventions terrestres sont reprises : un feu rouge signale le côté bâbord et un vert le tribord et un feu blanc l'arrière ; par ailleurs 2 feux, l'un blanc l'autre jaune matérialise sur la face avant l'axe horizontal. Pour faciliter le repérage à grande distance par le module de commande, un feu scintillant (50 éclats par seconde) émet une lumière visible à près de 700 km (400 nautiques).
L'AGS (Abort Guidance System) est un système de navigation et de pilotage destiné à remplacer le système principal (LGC) en cas de défaillance de celui-ci durant les phases de descente sur la Lune ou de remontée. L'activation de l'AGS entraîne l'interruption de la mission et le largage de l'étage de descente si le LEM est en cours d'atterrissage. L'AGS est conçu par une société différente TRW. Il est composé de :
- un ordinateur (AEA pour Abort Electronics Assembly) doté d'une mémoire vive de 4 ko et d'une mémoire morte de 4 ko dédiée aux programmes (mot de 18 bits). La mémoire utilise la même technologie que l'AGS.
- un système inertiel(ASA pour Abort Sensor Assembly) très compact (4 kg) composé de trois accéléromètres.
- d'une console d'affichage et de saisie (DSE pour Data Sensor Assembly) : plus rudimentaire que celle de l'LGC, permet d'afficher et de saisir des données dans le LGC.
L'ensemble pèse 28 kg et consomme une centaine de watts quand il est utilisé. Pour son fonctionnement le LGC exploite les données des radars et de son système inertiel. Plus simple que le système principal il dispose des fonctions suivantes : ramener le vaisseau en orbite basse, effectuer les manœuvres pour placer le LEM en orbite de transfert, corriger l'orbite, effectuer la manœuvre de rendez-vous avec le module de Commande. Les programmes sont différents de ceux de le LGC pour éviter qu'une même faille de programmation se retrouve dans les deux systèmes.
Au démarrage l'initialisation des caractéristiques de la position et de la trajectoire sont réalisées soit par transfert depuis l'ordinateur de navigation principal soit par saisie à l'aide de la console dédiée. Il agit sur la poussée du moteur principal et les moteurs d'attitude conformément au programme sélectionné et restitue au pilote certaines informations (altitude, vitesse) sur le tableau de bord. L'AGS est également utilisé pour vérifier les calculs de l'ordinateur de navigation principal, lorsque celui-ci fonctionne. Il fournit des informations télémétriques périodiques au Contrôle au sol.
Le système de contrôle environnemental
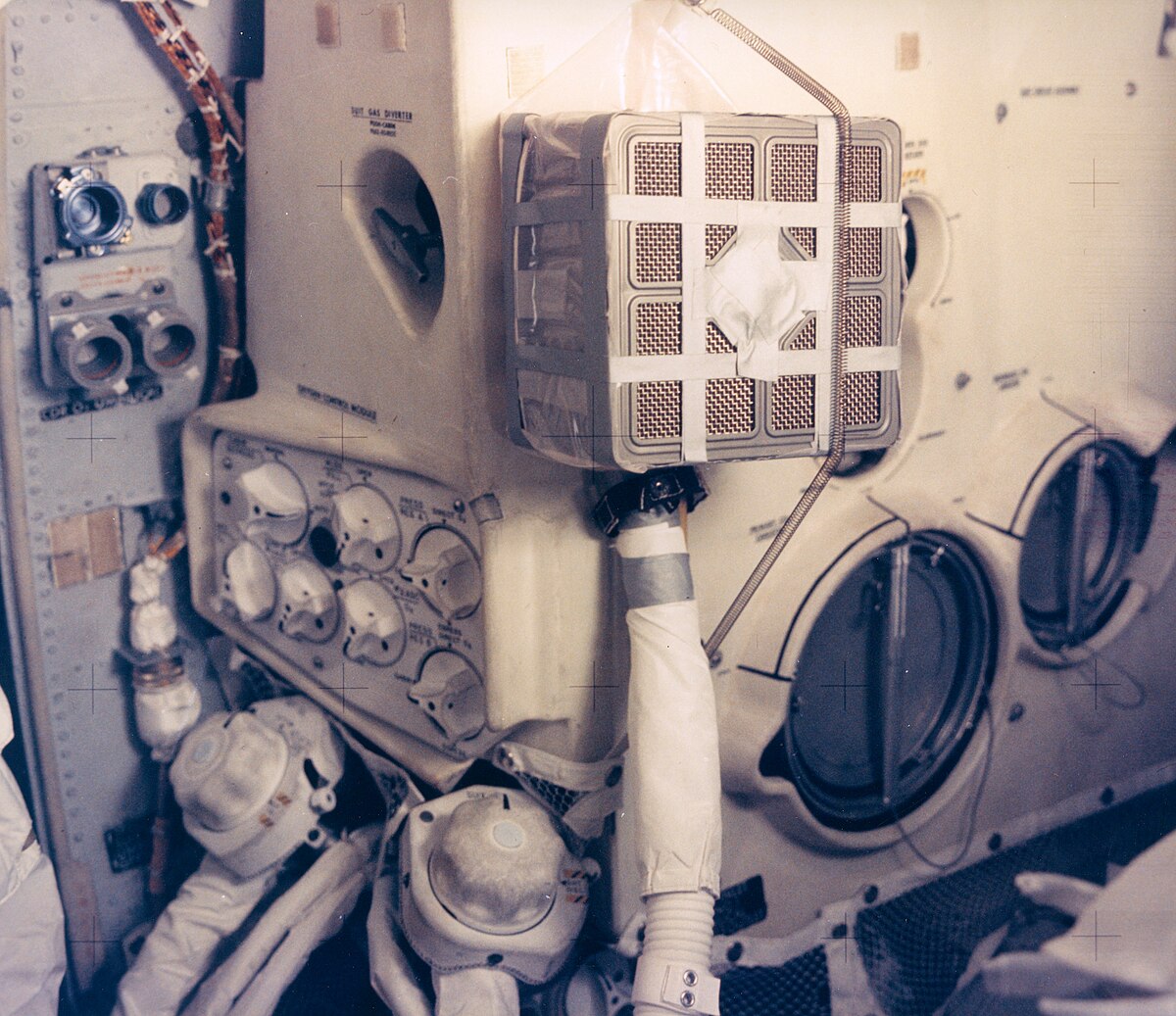
Le système de contrôle environnemental a en charge de fournir des conditions vivables pour les deux astronautes (oxygène, température), de maintenir l'électronique dans une fourchette de températures acceptable, de dépressuriser et pressuriser la cabine, de fournir l'eau pour l'alimentation (hydratation des aliments solides et boisson), l'extinction d'un éventuel incendie, le système de contrôle thermique et enfin d'alimenter en eau et oxygène le Système de Survie Portable (PLSS) utilisé par les astronautes durant les sorties extravéhiculaires (EVA).
Les réserves d'eau et d'oxygène sont, pour l'essentiel, situées dans l'étage de descente pour ne pas alourdir l'étage de remontée. (186 litres d'eau sur 225). Le module lunaire dispose d'un système d'alimentation en oxygène en circuit fermé comportant des filtres pour absorber le dioxyde de carbone.
Le contrôle thermique est à la fois passif et actif :
- Pour assurer un contrôle thermique passif, l'ensemble de l'étage est recouvert de plusieurs pellicules de matériau réverbérant la chaleur qui fait également office de bouclier contre les micrométéorites. La protection principale est constituée de 25 couches de mylar sur un support d'aluminium qui est maintenue écartée de 4 cm de la structure par des petits plots en nylon. Dans les endroits exposés aux flammes des moteurs, un « film-H », matériau offrant plus de résistance à la chaleur, est appliqué.
- Le contrôle thermique actif repose sur un circuit de refroidissement dans lequel circule un mélange eau-glycol qui traverse les équipements générateurs de chaleur situés à l'intérieur et à l'extérieur de la cabine pressurisée pour maintenir la température dans une fourchette permettant leur fonctionnement. La chaleur est dispersée en premier lieu grâce à des radiateurs ; la chaleur qui subsiste est évacuée par sublimation d'eau en gaz. Un circuit de refroidissement de secours permet de pallier une panne du circuit principal.
L'énergie électrique à bord
Grumman après avoir dans un premier temps étudié l'utilisation de piles à combustible pour fournir l'électricité opte pour des batteries classiques, plus simples à mettre œuvre, afin de tenir l'échéance
L'énergie électrique est fournie par quatre batteries (cinq à partir d'Apollo 15) situées dans l'étage de descente et deux batteries situées dans l'étage de remontée. Ces batteries non rechargeables fournissent en tout 2280 A-h (2667 A-h à partir de Apollo 15) sous 28 volts par le biais de deux circuits indépendants redondants. Les anodes en zinc et argent sont plongées dans un électrolyte d'hydroxyde de potassium. Le poids total des batteries est de 358 kg (420 kg à partir d'Apollo 15. Le courant est transformé en 110 V 400 Hz pour alimenter les différents sous-systèmes. Des batteries indépendantes déclenchent les systèmes pyrotechniques (séparation d'étage, déploiement du train d'atterrissage, percussion des réservoirs, ...) et sont présentes dans les systèmes de survie portables (PLSS).
Télécommunications
Le LEM dispose de deux systèmes de télécommunications :
- Un émetteur-récepteur qui fonctionne en bande S sur la fréquence de 2,2 GHz pour les communications longue distance avec la Terre (cette bande est utilisée parce qu'elle n'est que faiblement affectée par l'atmosphère terrestre). La Nasa a développé des appareils (Unified S-band System USB) qui permettent de transmettre à l'aide d'une même antenne des paquets de données, émissions télévisuelles ou vocales ainsi que de localiser l'émetteur. Le débit dépend de la nature des données transmises ;
- Un émetteur-récepteur VHF avec deux canaux utilisé pour les communications locales entre les deux vaisseaux et entre les astronautes durant les sorties extra-véhiculaires. Le système VHF a une portée de 1 400 km.
Ces systèmes de communication permettent également au Centre de Contrôle sur Terre de récupérer des données télémétriques qui permettent de connaître la position et de la trajectoire du LEM par trigonométrie en utilisant plusieurs stations de réception sur Terre. Des télémesures de l'état des différents sous-systèmes du vaisseau et les données biométriques des astronautes sont également récupérées en permanence par le Centre de Contrôle ; ces liaisons permettent aussi de télécharger des données dans l'ordinateur de navigation du LEM et de contrôler les données qui y son stockées. L'équipage du LEM utilise ces canaux pour transmettre des images vidéo (télévision).
Le LEM dispose de plusieurs antennes :
- Une antenne parabolique orientable de 66 cm de diamètre en bande S. Le maintien de l'orientation de l'antenne parabolique est réalisée automatiquement dès que l'émetteur terrestre a été accroché. Deux petites antennes coniques fixes omnidirectionnelles couvrant chacune 180° en bande S servent de systèmes secours ;
- Deux antennes VHF couvrant chacune 180° utilisées en vol ;
- Une antenne omnidirectionnelle VHF utilisée sur le sol lunaire pour les sorties extravéhiculaires ;
- Une deuxième antenne parabolique de 61 cm de diamètre en bande-S est déployée sur le sol lunaire (elle est montée sur le rover lunaire à partir de la mission Apollo 15) ;
Pour recevoir et émettre, les astronautes disposent d'un casque audio qu'ils peuvent porter sous leur tenue de sortie extravéhiculaire.
La version améliorée du LEM des missions J
Début 1969 la NASA lance des études pour s'assurer que la fusée Saturne 5 peut placer en orbite une charge plus lourde et que le module lunaire peut effectuer des missions plus longues sur la Lune (missions dites J). Les conclusions positives (Saturn 5 après évolution peut satelliser 2 tonnes supplémentaires) donnent le coup d'envoi au développement d'une version un peu plus lourde de l'étage de remontée du LEM.
Utilisée à compter de la mission Apollo 15 (première mission dite J), cette version du LEM est équipée de manière à pouvoir séjourner 67 heures sur la Lune (au lieu de 35 heures) et transporter plus d'équipements scientifiques ainsi que le rover lunaire. Les principales modifications sont :
- Une cinquième batterie dans l'étage de descente et un accroissement de la capacité par batterie de 400 à 425 A-h ;
- 500 kg de propergols supplémentaires dans l'étage de descente pour prendre en compte de l'alourdissement du LEM et donner plus de marge au pilote pour se poser. Les réservoirs sont allongés vers le bas de 10 cm ;
- Les réserves d'oxygène et d'eau sont accrues pour faire face à la consommation supplémentaire des astronautes ;
- La protection thermique est améliorée pour prendre en compte une durée d'exposition plus longue ;
- Le poids du matériel scientifique et d'exploration qui peut être logé dans les baies de l'étage de descente augmente de 180 kg, ce qui permet d'emporter le rover lunaire ;
- La tuyère du moteur de l'étage de descente est allongée de 25 cm pour fournir une poussée plus importante ;
- Le revêtement de la chambre de combustion du moteur de descente est modifié pour réduire le phénomène d'ablation.

















































