Mars Exploration Rover - Définition
La liste des auteurs de cet article est disponible ici.
Le rover
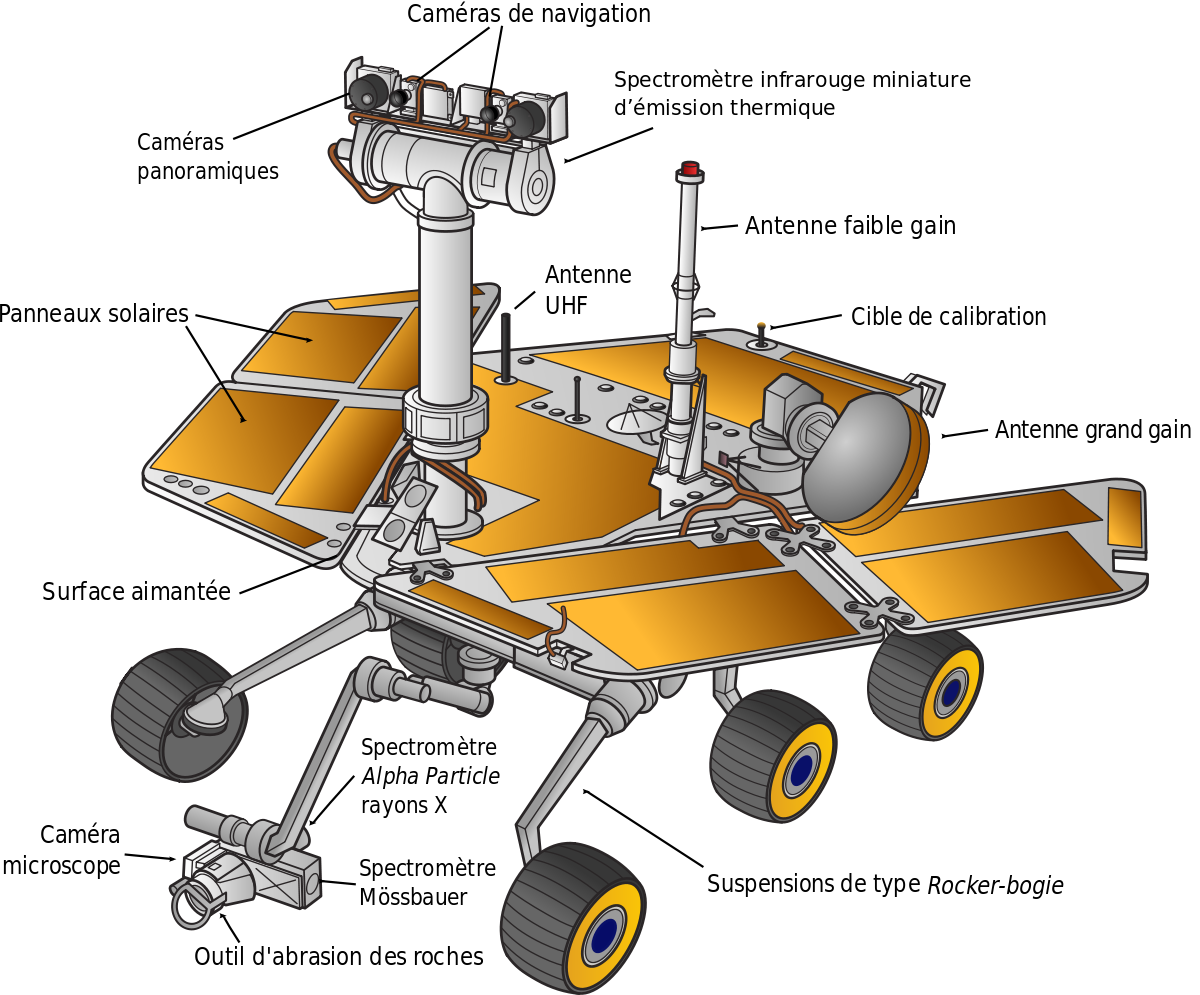
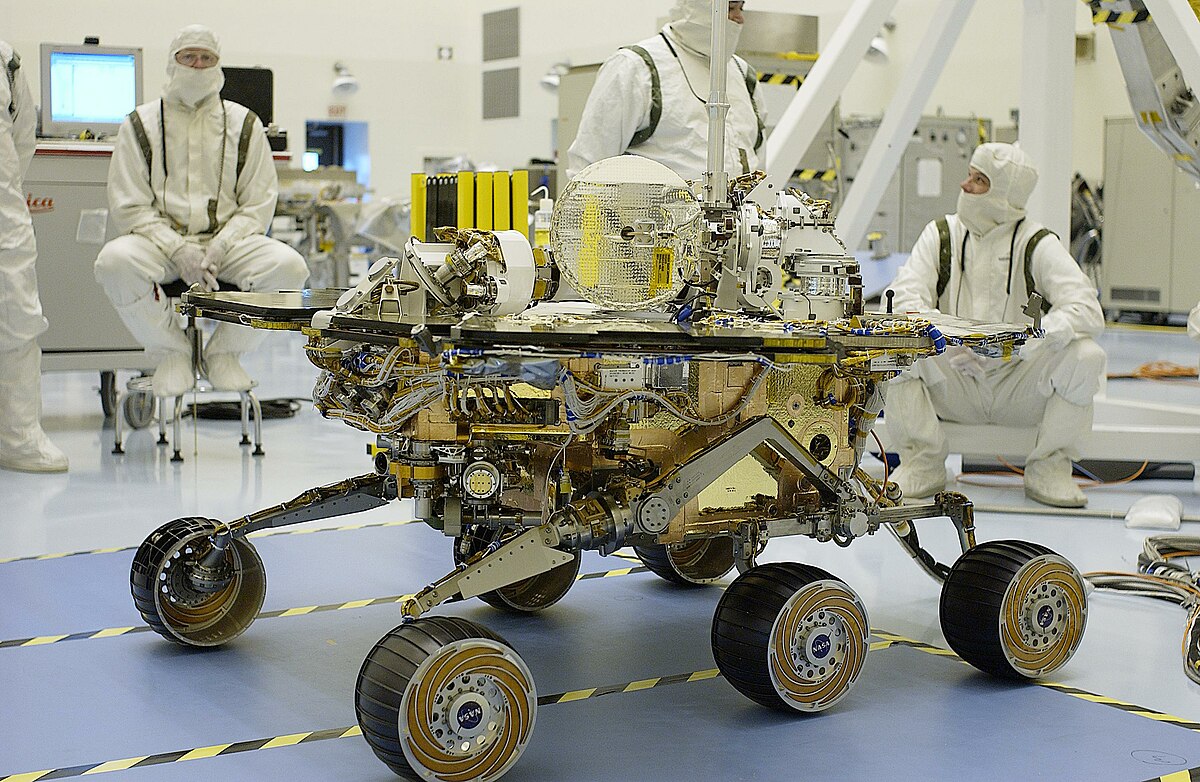
Les deux rovers sont identiques avec une hauteur de 1,5m, une largeur de 2,3 m, une longueur de 1,6 m et une masse de 185 kg. Le cœur du rover est constitué d'un boitier central de forme triangulaire réalisé en matériau composite en nid d'abeille qui abrite les composants devant être mis à l'abri des variations importantes de températures qui règnent à la surface de Mars. Le dessus du boitier est tapissé de cellules solaires et sert de support aux trois antennes de télécommunications. Un mat, qui culmine à 1,5 mètres de hauteur, porte la caméra panoramique à son extrémité supérieure, deux caméras de navigation et un spectromètre infrarouge. Trois panneaux solaires, situés de chaque côté du boitier central sont repliés durant le voyage et se déploient après l'atterrissage. Un bras robotisé (IDD) est fixé à l'avant du boitier au bout duquel se trouvent deux spectromètres (Mössbauer et APXR), une caméra microscope ainsi qu'une meuleuse. Le boitier repose sur un train de 6 roues, motorisées de manière indépendantes qui permet au rover de se déplacer sur le sol inégal de Mars.
Le boitier central
Les composants qui ne peuvent pas supporter les températures extrêmes de Mars (jusqu'à -105°C) sont placées dans le boitier central : on y trouve ainsi le cerveau du rover (l'ordinateur), la centrale à inertie, la partie électronique du spectromètre infrarouge du système de commande des moteurs des roues ainsi que les batteries qui doivent être maintenues à une température supérieure à -20°C en utilisation et 0°C en charge, etc... La température est régulée grâce à plusieurs dispositifs : radiateurs pour évacuer la chaleur, isolant constitué d'un aérogel de silice et d'une mince feuille d'or. Pour lutter contre le froid, huit pastilles contenant chacune 2,7 grammes de dioxyde de plutonium (Radio-isotope Heater Units ou RHU) produisent en permanence de la chaleur générée par la radioactivité. De la chaleur additionnelle est fournie à la demande par des résistances électriques. La chaleur dégagée par l'électronique embarquée contribue également à maintenir la température dans des limites tolérables.
La propulsion
Le rover utilise une suspension, baptisée rocker-bogie, mise au point par la NASA : celle-ci permet de franchir des obstacles d'une hauteur supérieure au diamètre des roues (26 cm). Le centre de masse abaissé du véhicule permet à celui-ci de rester stable sur une pente de 45° mais le programme de navigation embarqué est paramétré de manière à éviter les pentes supérieures à 30°. Les 6 roues sont équipées chacune d’un moteur individuel. Chacune des 4 roues d'extrémité comporte un moteur agissant sur la direction ce qui permet au rover de pivoter sur lui-même. Le véhicule peut progresser à une vitesse théorique de 5 cm/seconde (180 mètres/heure) mais en pratique ne peut dépasser 133 m/h quand sont pris en compte les changements de direction. Dans les cas les plus favorables le rover dispose d'énergie pour rouler durant quatre heures par jour martien.
Énergie
Les panneaux solaires d'une superficie de 1,3 m2 sont constitués de cellules photovoltaïques à triple jonctions, sélectionnées pour leur bon ratio rendement (28,3%) sur masse (2,06 kg.m-2). Ces panneaux peuvent fournir une puissance de 200 watts lorsque le Soleil culmine avec un ciel en grande partie dégagé de la poussière martienne. Dans ces conditions les panneaux solaires peuvent fournir jusqu'à 1 kW·h au cours d'une journée martienne, mais cette quantité peut chuter à moins de 200 W·h lors d'une tempête de poussière ou durant l'hiver martien. La poussière martienne qui s'accumule au cours du temps contribue également à réduire le rendement des panneaux solaires. Deux batteries lithium-ion constituées chacune de 8 cellules qui permettent de stocker 16 A·h à la tension de 32 volts permettent de restituer l'énergie produite lorsque la demande excède ce que peuvent fournir les panneaux solaires. La technologie lithium-ion a été retenue pour son excellent rapport énergie stockée/masse et sa capacité à supporter un grand nombre de cycles de charge/décharge; par ailleurs des développements effectués par la NASA ont permis la mise au point d'un électrolyte capable de supporter des températures de -30 °C.
Les équipements de communication
Contrairement au petit robot Sojourner de la mission Mars Pathfinder qui restait dépendant de son module d’atterrissage pour ses communications avec la Terre, les rovers MER disposent de leur propre système de communication. Les télécommunications jouent un rôle essentiel dans la mission MER. Comme toutes les sondes spatiales, la raison d'être des rovers est le recueil de données scientifiques qui doivent être ensuite acheminées vers la Terre. D'autre part des échanges fréquents de photos et d'instructions sont nécessaires pour guider le rover sur le terrain, même si celui-ci dispose d'une capacité à identifier et éviter les obstacles en toute autonomie. Le rover peut utiliser deux méthodes pour transmettre des données : la transmission directe vers la Terre lorsque le rover peut pointer ses antennes vers celle-ci ou l'émission vers les sondes en orbite qui servent de relais. Ce dernier moyen permet un débit plus important et est privilégié. Il était prévu initialement que les rovers utilisent un réseau de satellites de télécommunications placés en orbite autour de Mars pour communiquer avec la Terre (Mars Network). Mais le déploiement de ces satellites ne s'est pas réalisé et les rovers utilisent les orbiteurs existants : Mars Global Surveyor jusqu'à sa fin de vie en 2006, Mars Odyssey ainsi que Mars Reconnaissance Orbiter depuis son arrivée en orbite martienne en 2006. La sonde européenne Mars Express a également servi de relai à titre expérimental.
Le transfert des données entre le rover et la Terre fait face à plusieurs contraintes. Le rover a un équipement de communication de puissance limitée. Il dispose d'une quantité d'énergie réduite par la surface de ses panneaux solaires et l'équipement de télécommunications a dû être allégé au maximum. Les orbiteurs ont par contre dans ce domaine plus de capacité grâce à la taille de leur panneaux solaires et de leur équipement de télécommunications. Le débit de la transmission est donc généralement faible : il est compris entre quelques bits par secondes avec l'antenne faible gain du rover et 32 ko/secondes en utilisant l'antenne UHF et le relais des sondes qui orbitent autour de Mars. Pour que la transmission puisse avoir lieu il faut que l'émetteur et le récepteur soient visibles l'un par l'autre : l'orbiteur Mars Odyssey qui a été utilisé pour le transfert de la majeure partie des données n'est visible que durant 10 minutes à chacun de ses passages au-dessus du rover. La communication avec MRO qui orbite à plus basse altitude n'est possible que durant 5 minutes. Si le rover veut communiquer directement avec la Terre, il doit prendre en compte la rotation de la planète Mars et doit attendre si nécessaire de faire face à la Terre. Les communications directes vers la Terre sont par ailleurs limitées à 3 heures par jour martien pour limiter la consommation d'énergie et l'échauffement de l'électronique. Les rares antennes suffisamment puissantes sur Terre pour recevoir les émissions des sondes, dont le Deep Space Network de le NASA, doivent suivre un grand nombre de missions planétaires simultanées. Des créneaux horaires d'une heure sont alloués à chaque rover pour chaque jour martien pour les communications montantes (envoi d'instructions aux rovers, programme du jour) et descendantes (transfert de données scientifiques et de navigation). Une fois tous les deux ans la Terre et Mars se trouvent en opposition par rapport au Soleil. Il en résulte un black-out total des communications avec le rover qui dure 2 semaines : durant cette période, le rover ne se déplace plus et exécute un programme d'observation au voisinage de sa position.
Le rover dispose pour communiquer avec le contrôle au sol de 3 antennes :
- une antenne grand gain (HGA) parabolique de 28 cm de diamètre est utilisée pour communiquer directement avec la Terre en bande X. La bande X est privilégiée sur les sondes spatiales car elle permet le transfert de volumes importants de données sans nécessiter de grandes quantités d'énergie. L'antenne peut être pointée avec précision vers la Terre grâce à deux moteurs fournissant deux degrés de liberté. Son débit est de 11 Kbit/s pendant trois heures par jour au maximum. Elle a été ajoutée à l'équipement du rover pour compenser l'abandon du réseau de satellites de télécommunications martiens. Pour que la masse du rover reste identique il a fallu supprimer le spectromètre Raman, un des instruments scientifiques prévu dans la mission initiale.
- une antenne faible gain omnidirectionnelle (LGA) fixe permet également de communiquer directement avec la Terre également en bande X mais avec un débit très faible compris entre 7 et 10 bits/s.
- une antenne UHF omnidirectionnelle de portée limitée est utilisée pour communiquer avec les orbiteurs américains Mars Global Surveyor et Mars Odyssey et MRO lorsqu'ils sont à la verticale du robot. Son débit est de 32 ko/secondes, pendant une ou deux sessions de quelques minutes par jour. Au cours d'un seul passage de 8 minutes, le rover peut transférer 7,5 Mo de données. Le transfert du même volume de données par émission directe vers la Terre durerait d'une heure et demi à cinq heures.
Les deux robots Spirit et Opportunity utilisent des fréquences différentes, de manière à éviter toute confusion à la réception de leurs signaux sur Terre.
Objectifs et contraintes
Pour remplir sa mission le rover doit se déplacer sur le sol martien en évitant les obstacles, rechercher et identifier des échantillons de sol intéressants puis positionner avec précision ses instruments chargés de recueillir les données scientifiques : certains doivent être plaqués contre la roche à analyser (spectromètre Mössbauer et APXS), d'autres doivent être simplement pointés avec précision vers leur cible (caméras et spectromètre infrarouge). Le pilotage du rover à la surface de Mars comporte de nombreuses contraintes. L'échange de données par radio entre la Terre et Mars nécessite de 8 à 42 minutes en fonction de la position respective des deux planètes. Il n'y a généralement qu'une seule vacation radio par jour martien entre le rover et les contrôleurs à Terre pour plusieurs raisons : le rover dispose d'une quantité d'énergie limitée à consacrer aux télécommunications, ces échanges utilisent comme relais un des orbiteurs martiens qui doit survoler le site du rover et le réseau d'antennes de réception sur Terre est peu disponible. De plus la navigation du rover doit être très prudente, car aucune réparation du matériel n'est possible or le terrain martien est irrégulier (la garde au sol du rover est de 30 cm) et les zones géologiques intéressantes sont souvent situées dans des zones escarpées. Le rover dispose d'une quantité d'énergie limitée qui lui permet de rouler au plus 4 heures durant une journée martienne.
Compte tenu de la durée de vie limitée du rover et de la complexité des recherches géologiques entreprises, les concepteurs du rover ont voulu que celui-ci puisse franchir 100 mètres au cours d'une journée martienne. Avec les contraintes énoncées plus haut cet objectif ne peut être atteint si un téléopérateur humain doit superviser chaque avancée du rover. Le recours à une série de commandes préparées à l'avance par le contrôle à Terre sur la base de photos prises par le rover et les orbiteurs martiens a ses limites : au-delà d'une certaine distance les informations disponibles sur les photos ne sont pas suffisamment précises, le rover peut circuler sur un terrain glissant qui fausse l'estimation de sa trajectoire réelle. Les concepteurs des rovers MER ont donc inclus dans le logiciel embarqué des fonctionnalités lui permettant de se déplacer de manière autonome vers son objectif.
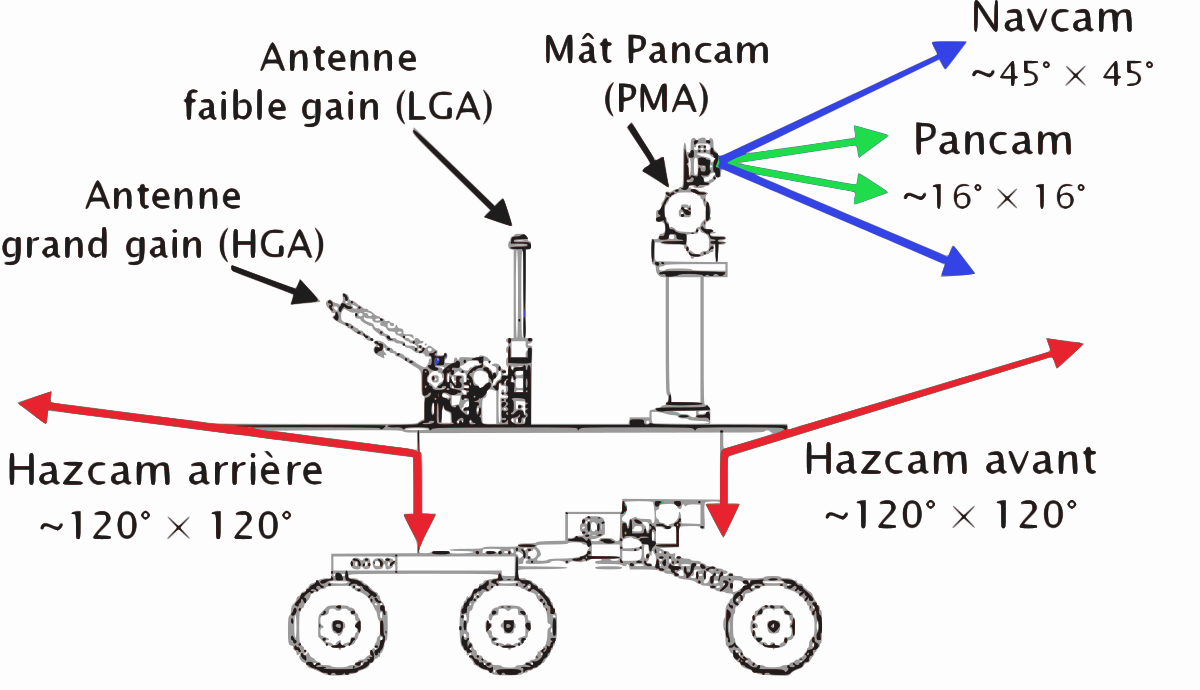
Le logiciel de navigation utilise, pour déterminer la trajectoire, des données fournies par plusieurs capteurs. Une centrale à inertie comportant 3 accéléromètres et trois gyromètres donne la direction (il n'y a pas de champ magnétique ni de système de navigation par satellites sur Mars). Au bout de quelques heures un écart de plusieurs degrés peut apparaitre entre l'orientation réelle et l'orientation déterminée à l'aide de la centrale à inertie. Pour pallier cette dérive, une caméra est pointée vers le Soleil pour fournir le relèvement de celui-ci. L'orientation réelle est alors calculée en utilisant cette information, combinée avec l'heure solaire locale et la direction de la verticale locale (fournie par l'accéléromètre). Un odomètre utilise le nombre de tours de roue pour fournir la distance parcourue. Des détecteurs placés sur le châssis permettent de déterminer si le véhicule se trouve dans une position dangereuse (inclinaison importante, suspension fortement sollicitée). Un ensemble de 8 caméras fournit des informations sur le terrain environnant :
- deux paires de caméras monochromes permettant d’obtenir des images en relief, destinées à détecter les obstacles sur le parcours de l’appareil : une paire située à l’avant du rover (Front Hazcam), à 52 cm de hauteur au niveau du pont du rover sert également à observer le fonctionnement du bras robotisé ; l'optique est un objectif grand angle de 125° ; une deuxième paire située à l’arrière du rover (Rear Hazcam) joue un rôle identique
- une paire de caméras grand angle (Navigation Camera ou NavCam), placée en haut du mat, est utilisée pour la navigation; l'optique a un angle de vue de 45° et permet d'obtenir des images de qualité entre 2 et 20 mètres de distance,
- La paire de caméra PanCam couleur, utilisée également pour les travaux scientifiques, est dotée d'un téléobjectif (18°) et permet d'obtenir des images exploitables pour la navigation jusqu'à 50 mètres.
Lorsque la trajectoire est définie par le contrôle à Terre (mode Direct Driving), une série d'instructions décrivant le parcours à suivre décomposé en segments (distance+ direction) est téléchargée en début de journée puis exécutée de manière séquentielle. Le déplacement peut être interrompu si le rover détecte à l'aide de ses capteurs une situation à risques (inclinaison trop importante, ...) ou si le temps alloué au déplacement est dépassé ou si l'engin a une défaillance mécanique.
Lorsque le rover circule de manière autonome, le logiciel de navigation du rover comporte trois fonctions qui optimisent le déroulement et limitent le risque associé à ce mode :
- Le système de détection des obstacles (Terrain Assessment) utilise les caméras Hazcam pour identifier les obstacles situés sur sa trajectoire.
- Le système de sélection de trajectoire (Path Selection) permet au rover de choisir sa trajectoire vers la cible, en tenant compte de sa position estimée à l'aide des capteurs et des données fournies par les deux autres fonctions si elles sont activées.
- Le système d'odométrie visuel (Visual Odometry) permet au rover de déterminer avec précision sa position en comparant des photos prises à intervalle rapproché. Cette fonction est utilisée notamment lorsque le rover se trouve sur un terrain glissant (du fait de la nature du sol ou de la pente) qui entraine des erreurs importantes sur le position calculée.
La combinaison de ces fonctions permet d'obtenir plusieurs modes de navigation autonome. Le mode est choisi en fonction de la nature du terrain et de la distance à la cible. Au cours des 18 premiers mois de la mission les deux rovers ont utilisé essentiellement les modes de navigation suivants :
- Blind Goto Waypoint (~40% de la distance franchie) : seul le système de sélection de trajectoire est activé. Ce mode est utilisé lorsque le rover doit parcourir de grandes distances en terrain plat. La vitesse de déplacement maximale est d'environ 133 mètres par heure.
- Autonav (~25%) : le système de sélection de trajectoire et celui de détection d'obstacles sont activés. Ce mode est utilisé sur des terrains plus délicats lorsque la pente n'est pas trop forte. La progression se fait par pas de 50 cm mais lorsque le terrain n'est pas trop encombré, la détection d'obstacles n'est effectuée que tous les 1,5 à 2 mètres. La vitesse de progression est comprise entre 12 et 35 mètres par heure.
- Visodom (~9%) : seul le système d'odométrie visuel est activé. Ce mode est utilisé pour les parcours d'approche en terrain très pentu. Le rover avance par pas de 60 cm et prend à chaque fois des photos pour recaler sa position. La vitesse de déplacement est d'environ 12 mètres par heure.
- Direct Driving (~25%) : dans ce mode, le rover n'est pas autonome et exécute les instructions du contrôle au sol. Une phase d'avancement en mode Autonav est souvent programmée à la fin de son exécution.
Le recours au mode Visodom et AutoNav est limité par la faible puissance du microprocesseur cadencé à 20 MHz qui doit exécuter en parallèle jusqu'à 90 taches même si, en général, 75 % du temps machine peut être consacré aux fonctions de navigation. Le traitement d'une photo pour les besoins de la navigation dure de 2 à 3 minutes et nécessite un arrêt complet de la progression du rover pour que le résultat des calculs puisse être exploité avant d'être périmé.
La planification d'une journée de navigation est effectuée par les équipes au sol du JPL qui regroupent des scientifiques qui identifient les cibles intéressantes et dépouillent les résultats et des ingénieurs chargés de préparer les instructions à exécuter par les rovers et de surveiller le déroulement des opérations. Le rover opère lorsque le Soleil est au plus haut. À l'issue de sa journée de travail, il transmet à l'équipe sur Terre des photos qui vont servir à identifier des objectifs scientifiques et à préparer la route du lendemain. Au cours du processus de préparation des arbitrages sont effectués pour prendre en compte les besoins en énergie, échanges radio et les capacités du rover (pente,...).
Durant la première phase de la mission MER, l'ensemble de l'équipe au sol travaillait à l'heure martienne 7 jours sur 7 avec un décalage de 40 minutes chaque jour par rapport à l'heure terrestre. Ce rythme épuisant a été abandonné dès la première extension de la mission 90 jours après l'atterrissage : le temps de préparation qui nécessitait chaque jour 18 heures a été fortement réduit par la création de séquences de commandes et grâce à l'expérience acquise. Par la suite une optimisation plus poussée du processus avec un système de distribution automatisé des taches et une dématérialisation quasi complète des supports de communication a permis aux scientifiques de réintégrer leur entité d'origine tout en maintenant leur participation au projet.
Les instruments scientifiques

- Les caméras panoramiques (PanCam) de haute résolution, fixées au sommet du mat vertical porteur d’instruments. Chacun de ces instruments est équipé d’un capteur CDD de 1024 pixels sur 1024 pixels. Ce dispositif permet de réaliser des images en relief et de repérer les roches et les sols intéressants pour une analyse ultérieure à l'aide des autres appareils de mesure. La PanCam est équipée de :
- 8 filtres montés sur une roue permettant des captures d’images à des longueurs d’onde de 0,4 à 1,1 micromètres.
- 2 filtres solaires sont utilisés pour mesurer l’absorption du rayonnement solaire par les poussières présentes dans l’atmosphère de Mars.
- des filtres permettent d'étudier le spectre infrarouge avec l'objectif droit de la Pancam.
- des filtres permettent d'étudier le spectre en lumière visible avec l'objectif gauche de la Pancam.
Chaque robot transporte également trois spectromètres :
- un spectromètre infrarouge miniature d’émission thermique (Mini-TES), pour étudier la composition minéralogiques des roches et des sols, en mesurant le rayonnement naturel infrarouge émis par ces objets. Cet appareil est fixé sur le mât de chaque rover, à côté de la caméra panoramique.

- un spectromètre Alpha Particle Rayons X (APXS), développé par l’Institut Max-Planck de chimie de Mayence en Allemagne, employé pour des analyses rapprochées de l’abondance des éléments constitutifs des roches et du sol. Les sources radioactives de Curium 244 de cet appareil bombardent de particules alpha et de rayons X le substrat à étudier. Ensuite, il analyse soit les rayons X émis par les éléments les plus lourds, soit les particules alpha réfléchies par les éléments les plus légers (carbone, oxygène, azote mais pas hydrogène et hélium). Cet instrument est fixé au bout du bras robotisé.
- un spectromètre Mössbauer MIMOS II, élaboré par le Dr. Göstar Klingelhöfer de l’université Johannes Gutenberg de Mayence, en Allemagne, employé pour l’examen rapproché de la minéralogie des roches et des sols. Cet appareil utilise un rayon gamma pour mesurer la présence de minéraux riches en fer et leur état d’oxydation. Il est placé au bout du bras robotisé.

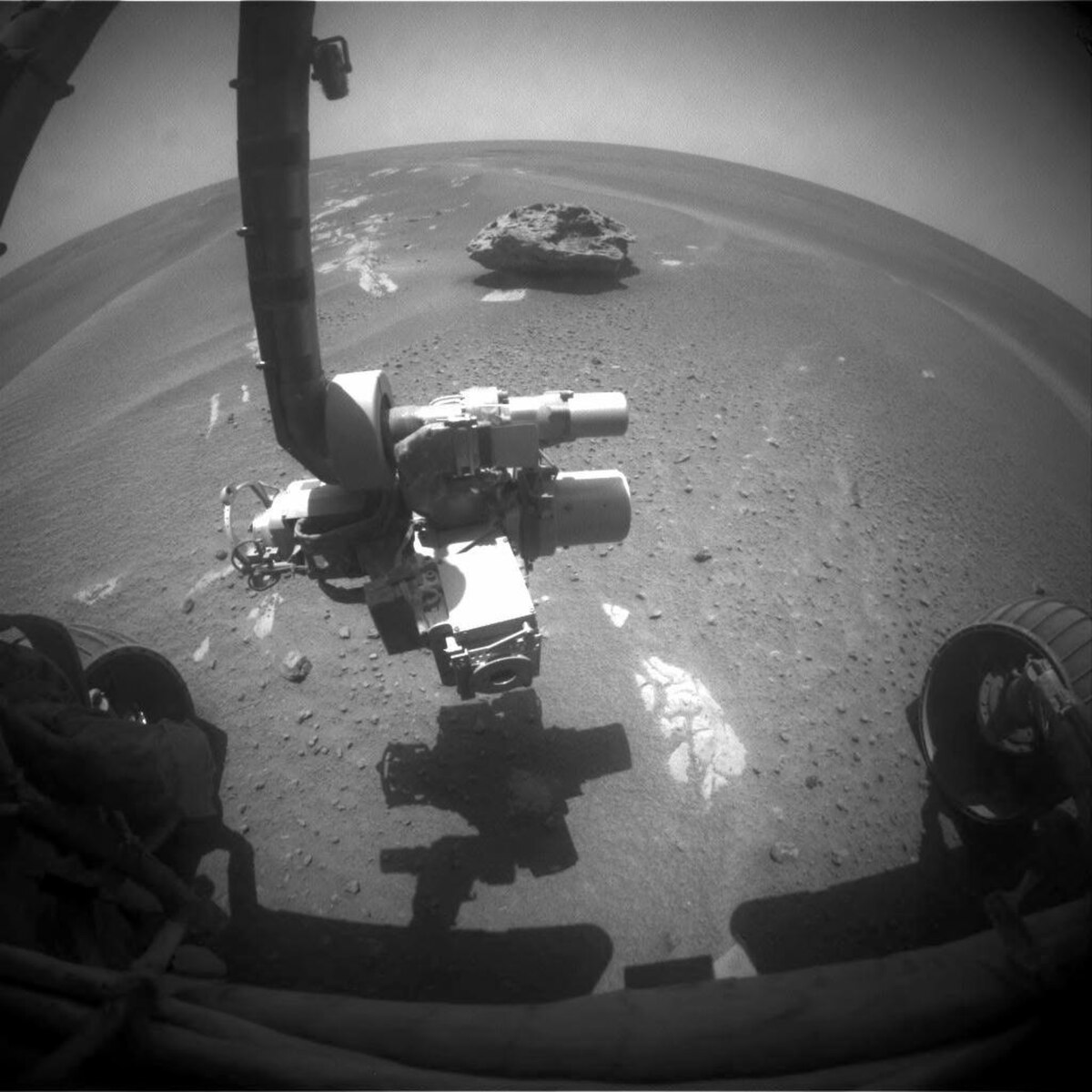
- un outil d’abrasion des roches (RAT), qui permet d’enlever la poussière et la surface des roches à étudier sur un diamètre de 4,5 cm, et une profondeur de 5 mm, grâce à une meule constituée d’éclats de diamants fixés sur une résine solide. Cet instrument permet d’étudier les roches en évitant les biais liés à la poussière ou à une altération de surface. Il est disposé au bout du bras robotisé. L’image ci-contre montre une vue en gros plan prise par la caméra microscope du robot Spirit, d’une zone abrasée par l’outil RAT du rocher Mazatzal, le jour Sol 82 de la mission MER A sur Mars.
- une caméra microscope (Microscopic Imager), placée sur le bras robotisé, permettant d’obtenir des gros plans d’une résolution de 20 à 40 micromètres par pixel. Pour que la mise au point soit correcte, le microscope est maintenu à une distance fixée de la surface photographiée grâce une petite tige métallique qui fait saillie.
- 7 aimants destinés à piéger les particules magnétiques, et à les étudier à l’aide de la caméra panoramique, de la caméra microscope, et des spectromètres Mössbauer et APXS. Le dispositif de capture magnétique est constitué d’un cylindre central et de trois anneaux, ayant chacun une orientation magnétique alternée. L’ensemble constitue un cylindre de 4,5 cm de diamètre. Les poussières s’accumulent au fil du temps, au fil des captures des particules en suspension dans l’air martien, qui est très riche en poussières. Comme les différents aimants ont des puissances différentes, les plus faibles ne capturent que les particules plus magnétiques, alors que les plus forts les capturent presque tous. En revanche, il ne sera pas possible de savoir quelle est l’origine précise d’un ensemble donné de poussières.
L'équipement informatique
L’équipement informatique du rover est utilisé durant toutes les phases de la mission à partir du lancement de la sonde. Il gère en particulier la navigation astronomique et les corrections de trajectoire durant le voyage Terre-Mars, les opérations de séparation de l'étage de croisière et du module de rentrée, les différentes tâches qui s'enchainent durant la phase de rentrée et d'atterrissage et le déploiement du rover après l'atterrissage. Sur le sol martien, compte tenu de l'éloignement de la Terre qui nécessite une grande autonomie du rover, l'ordinateur est fortement sollicité : il doit collecter les données télémétriques sur l'état du rover, gérer les communications en jonglant avec les 3 modes existants et les fenêtres s'ouvrant au passage des orbiteurs, exécuter les instructions du sol touchant aux déplacements et à la mise en œuvre des instruments scientifiques, compresser les données recueillies pour optimiser le volume de données à transférer et lorsque le rover progresse en mode autonome effectuer les calculs déterminant la meilleure route à suivre.
Le système informatique repose sur un unique microprocesseur RAD 6000 de type RISC 32 bits : cette version du processeur PowerPCest durcie pour résister à l'effet néfaste des radiations et peut traiter 20 millions d’instructions par seconde. Il utilise 128 Mo de mémoire vive de type DRAM, 256 Mo de mémoire flash et 3 Mo de mémoire morte de type EEPROM (mémoire non volatile). Le système d'exploitation est VxWorks, un OS temps réel de la firme Wind River, déjà employé pour les missions Mars Pathfinder et Stardust.
Le logiciel est en partie hérité de la mission Mars Pathfinder et de manière marginale de Deep Space 1, Mars 98 et Mars Odyssey. Il est écrit essentiellement en langage C avec quelques modules en C++ et représente 305 000 lignes de code occupant avec le système d'exploitation un volume de mémoire de 11 Mégaoctets. Le logiciel est décomposé en modules indépendants se répartissant en 5 couches : interfaces avec les composants physiques du rover (moteur, antenne,...), pilotage de ces composants, application, gestion de la sonde, de la charge utile et de la mission, gestionnaire d'événements. Les taches communiquent entre elles à l'aide de messages point à point transportant l'ensemble du contexte sauf cas particulier (traitement des images).

















































