Hélicoptère radiocommandé - Définition
La liste des auteurs de cet article est disponible ici.
Fonctionnement
Fonctionnement aérodynamique
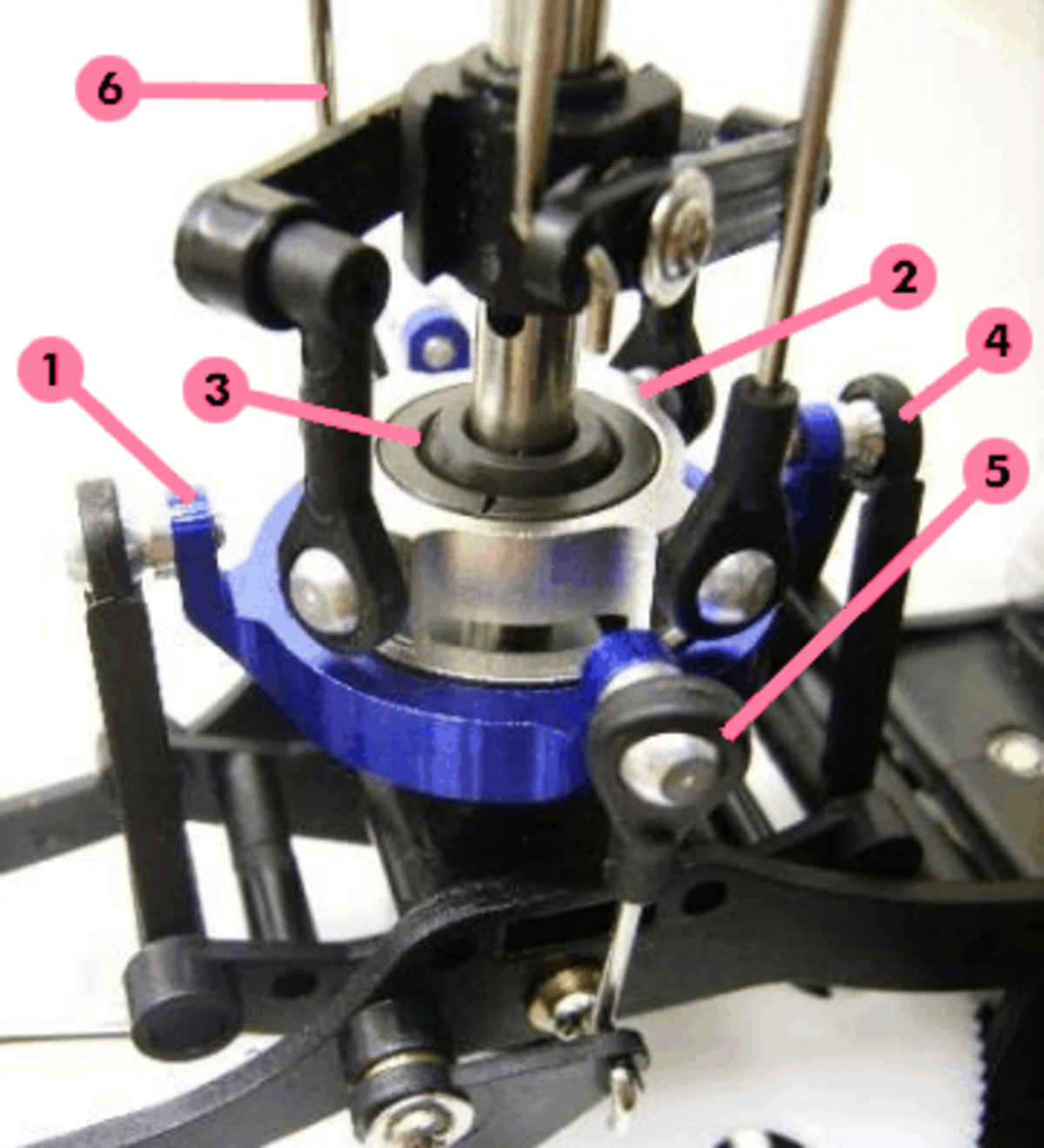
1 couronne fixe (bleu)
2 couronne mobile (argent)
3 roulement
4 tige de commande (tangage)
5 tige de commande (roulis)
6 biellette de pas (vers la pale)
Un hélicoptère radiocommandé fonctionne comme un hélicoptère de taille normale : le rotor est l'hélice principale qui permet la sustentation, il est commandé par le Plateau cyclique (hélicoptère). Le rotor anticouple ou les rotors contrarotatifs sont les dispositifs destinés à empêcher l'hélicoptère de tourner en sens inverse du rotor principal.
Commandes de vol
Les divers contrôles de l'hélicoptère sont assurés par de petits moteurs servocommandés. La radiocommande doit pouvoir gérer :
- la vitesse angulaire du rotor principal (couramment appelée « commande des gaz », elle contrôle la vitesse ascensionnelle donc l'altitude) ;
- le plateau cyclique (commande de tangage et de roulis, ainsi que la vitesse ascensionnelle lorsque l'hélicoptère est équipé d'un pas collectif) ;
- le dispositif anticouple (commande de lacet).
La commande du plateau cyclique se fait au moyen de la commande de pas général (aussi appelée pas collectif) tenue par la main droite du pilote sur la télécommande. La commande des gaz et du pas est généralement multiplexée sur la même voie de la télécommande. Dans le cas d'un hélicoptère à pas fixe, seuls les gaz permettent de contrôler l'altitude de l'aéronef.
Le contrôle du lacet se fait généralement à l'aide du rotor anticouple par changement du pas ou de la vitesse de rotation du rotor de queue. Un gyroscope peut constituer une aide au pilotage en stabilisant le lacet de l'hélicoptère.
Ces différentes commandes permettent de faire effectuer à l'hélicoptère la plupart des manœuvres d'un avion et d'autres qui ne lui sont pas possibles, comme le vol stationnaire et en marche arrière, ils sont ainsi similaires aux vrais hélicoptères.
Hélicoptère birotor contrarotatif
Avec deux rotors de sustentation coaxiaux (tournant autour du même axe) comme le Dragonfly 53 et le Micro 47G. Ces hélicoptères sont particulièrement destinés à l'apprentissage du pilotage d'hélicoptère radiocommandé. Ils sont plus stables et plus simples à contrôler que les hélicoptères normaux. Ils possèdent deux rotors superposés tournant en sens inverse et ne possèdent pas de rotor de queue.
Hélicoptère birotor en tandem

Ce modèle possède deux rotors de sustentation en tandem (l'un derrière l'autre). Ce système dans lequel les rotors tournent en sens inverse permet d'annuler le couple de réaction du rotor sur la cellule. Son principal promoteur a été l'Américain Frank Piasecki.
Contrôle radio
Radiocommandes

Les petits hélicoptères à pas fixe ne nécessitent qu'une radio à quatre canaux (gaz, ailerons, gouvernes, volets) alors que pour les modèles à pas collectif il est nécessaire d'avoir au moins 5 canaux, 6 étant le plus courant. À cause de l'interaction entre les diverses commandes, les radios les plus sophistiquées comprennent des réglages de fonctions mixtes comme gaz/collectif et gaz/gouverne.
Certaines sont très sophistiquées, permettant la double commande, ou possédant des fonctions telles que le contrôle du temps de vol restant avant que le réservoir ou la batterie ne soit vide, ou détectant tout comportement suspect du matériel, et permettent à l'utilisateur de faire atterrir son hélicoptère avant la panne pour éviter des dégâts sur l'appareil.
Les marques principales sont Spektrum, Futaba, JR, Hitec, Airtronics, Sanwa, Multiplex.
Les prix des radios varient de deux cents à plusieurs milliers d'euros.
Modulation
Les radios émettent un signal en FM selon deux types de modulation. Le mode PPM, meilleur marché que le mode PCM, est généralement utilisé sur les hélicoptères RC d'entrée de gamme. La moindre fiabilité du mode PPM le rend plus adapté aux petits modèles qui sont moins dangereux que des appareils plus lourds. Les radios haut de gamme offrent les deux modes (PCM et PPM) afin d'offrir une compatibilité avec la majorité des récepteurs.
PPM
Le Pulse Position Modulation est une modulation de type FSK dans laquelle la position de chacun des servomoteurs est codée par une impulsion de largeur variable. Chaque trame, d'une longueur fixe, débute par une impulsion de synchronisation. L'avantage de cette transmission est la simplicité de l'électronique nécessaire, ce qui a fait son succès aux débuts du radiomodélisme. Son inconvénient principal est l'absence de détection d'erreur.
PCM
Le Pulse Code Modulation est un mode de modulation en fréquence de type FSK dans lequel la commande de chaque servomoteur est transmise sous forme d'un nombre codé. Les fabricants ont chacun leur propre système de codage de ce nombre sur une série variable de bits. JR utilise le mode Z-PCM (10 bits, 512 valeurs) et le S-PCM (11 bits, 1 024 valeurs). Futaba utilise le PCM-1024 et le G3 PCM (12 bits, 2 048 valeurs). L'avantage du codage PCM est de détecter les erreurs de transmission, ce qui permet de mettre les servomoteurs dans une position prédéfinie ou de les maintenir dans la dernière position correcte après la perte du signal : ce mode se nomme Fail Safe, et s'avère intéressant en termes de sécurité, notamment dans les hélicoptères (coupure des gaz en cas de perte de contrôle de l'appareil).

















































