Formules de physique - Définition
Source: Wikipédia sous licence CC-BY-SA 3.0.
La liste des auteurs de cet article est disponible ici.
La liste des auteurs de cet article est disponible ici.
- Introduction - Signification des symboles - Dynamique - Cinématique du MRUA ou des cas où l'accélération est constante - Mouvement harmonique simple et pendule simple - Travail, énergie, et puissance - Mouvement circulaire uniforme et gravitation - Quantité de mouvement - Mouvement circulaire - Thermodynamique - Mécanique des fluides
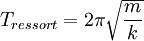
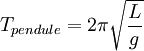
Mouvement harmonique simple et pendule simple
-


-





-

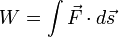
Travail, énergie, et puissance
Le travail, l'énergie et la puissance décrivent la manière dont les objets affectent la nature.
-



-


-


-


-


-




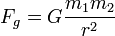
Mouvement circulaire uniforme et gravitation
Un objet, par exemple un satellite autour d'une planète ou une planète autour du soleil, se déplace sur une circonférence à vitesse dont la grandeur est constante.
Dans cette section, ac et Fc réprésentent respectivement l'accélération centripète et la force centripète.


-






-


Quantité de mouvement
La quantité de mouvement est la grandeur associée à la vitesse d'une masse, en mécanique classique.
-


-


-


-


-


Mouvement circulaire
-






-




-


-

-


-





- Introduction - Signification des symboles - Dynamique - Cinématique du MRUA ou des cas où l'accélération est constante - Mouvement harmonique simple et pendule simple - Travail, énergie, et puissance - Mouvement circulaire uniforme et gravitation - Quantité de mouvement - Mouvement circulaire - Thermodynamique - Mécanique des fluides

















































