CORDIC - Définition
La liste des auteurs de cet article est disponible ici.
Introduction
CORDIC (sigle de COordinate Rotation DIgital Computer : « calcul numérique par rotation de coordonnées ») est un algorithme de calcul des fonctions trigonométriques et hyperboliques, notamment utilisé dans les calculatrices. Il a été décrit pour la première fois en 1959 par Jack E. Volder. Il ressemble à des techniques qui avaient été décrites par Henry Briggs en 1624.
Il s'agit d'un algorithme de choix lorsque aucune implantation matérielle d'un multiplicateur n'est disponible (sur certains microcontrôleurs simples ou des FPGA). De plus, l'algorithme du CORDIC s'adapte bien au calcul à la chaîne. À l'origine, la programmation du CORDIC reposait sur un système binaire.
Durant les années 1970, les versions décimales du CORDIC (avec des nombres codés en BCD) commencèrent à apparaître, notamment dans les calculatrices où les critères de coût du matériel sont plus importants que la vitesse de traitement. Un autre avantage du CORDIC est sa flexibilité puisqu'il permet de calculer plusieurs fonctions avec quasiment le même code.
Description
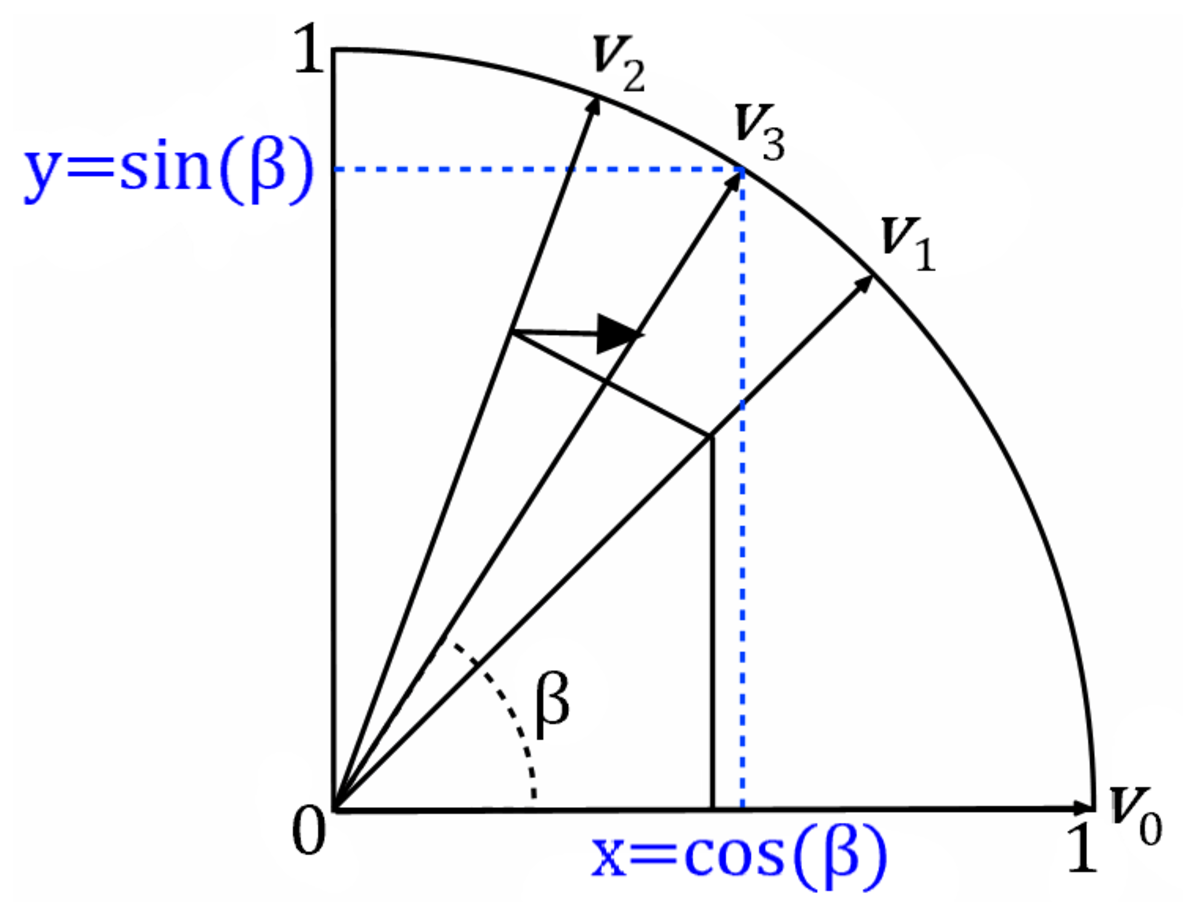
CORDIC permet de déterminer le sinus ou le cosinus d'un angle donné en radians sous un format à virgule fixe. Pour trouver le sinus ou le cosinus d'un angle β, on recherche la coordonnée x ou y du point du cercle unité lui correspondant. CORDIC débute les calculs avec un vecteur v0 tel que :

Durant la première itération, le vecteur subit une rotation de 45° dans le sens anti-horaire (sens trigonométrique) afin d'obtenir un nouveau vecteur v1. Des itérations successives doivent engendrer une rotation du vecteur dans la bonne direction. À chaque itération, la rotation est faite d'un angle prédéterminé et moindre que le précédent. Ceci jusqu'à converger vers l'angle voulu.
Plus formellement, à chaque itération i, on calcule un nouveau vecteur grâce à la multiplication du vecteur vi avec la matrice de rotation Ri :

La matrice de rotation


En factorisant le terme


Le facteur




Le calcul devient :
avec

Ces coefficients Ki peuvent être ignorés pendant les itérations et factorisés en un seul coefficient multiplicatif final (dépendant de n) :
qui peut être calculé à l'avance et prémémorisé. Également, lorsque n tend vers l'infini, ce produit tend vers une constante :

Après suffisamment d'itérations, l'angle du vecteur sera proche de l'angle

La dernière étape consiste à déterminer à chaque itération le sens de rotation, trigonométrique ou horaire (un résultat reporté sur la valeur de
-


Les valeurs de γn sont précalculées dans une table prémémorisée de valeurs. Toutefois, pour des angles petits, on utilise l'approximation

Comme illustré dans le schéma ci-dessus, le sinus de l'angle β est la coordonnée y du vecteur final vn, alors que la coordonnée x correspond au cosinus.

















































