Pendule inversé - Définition
En physique, un pendule inversé est un pendule simple. Il présente une position d'équilibre instable s'il est maintenu vertical à 180°, mais cette position est maintenue par un système de contrôle ou par excitation de Kapitza. C'est un problème de physique non-linéaire.
Équation du mouvement
La situation est exactement la même que celle décrite pour le pendule simple, en considérant une tige rigide mais de masse négligeable. On définit donc :
- θ l'angle formé entre la tige et la verticale ;
- m la masse du pendule ;
- l la longueur de la tige ;
- g l'accélération de la pesanteur ;
On note les dérivées temporelles par un point :
-




On peut alors établir la période des oscillations :
-


L'énergie cinétique est :
-

L'énergie potentielle de gravité :
- Ep = mgl(1 − cosθ).
Si le pendule est laissé libre, on peut écrire la conservation de l'énergie mécanique, E = Ec + Ep. Alors, on obtient :
-

La différence avec le pendule simple est que l'on s'intéresse à la situation θ ≈ π [2π] ; cela correspond à un maximum de l'énergie potentielle, c'est-à-dire à un équilibre instable.
Pendule inversé sur un chariot
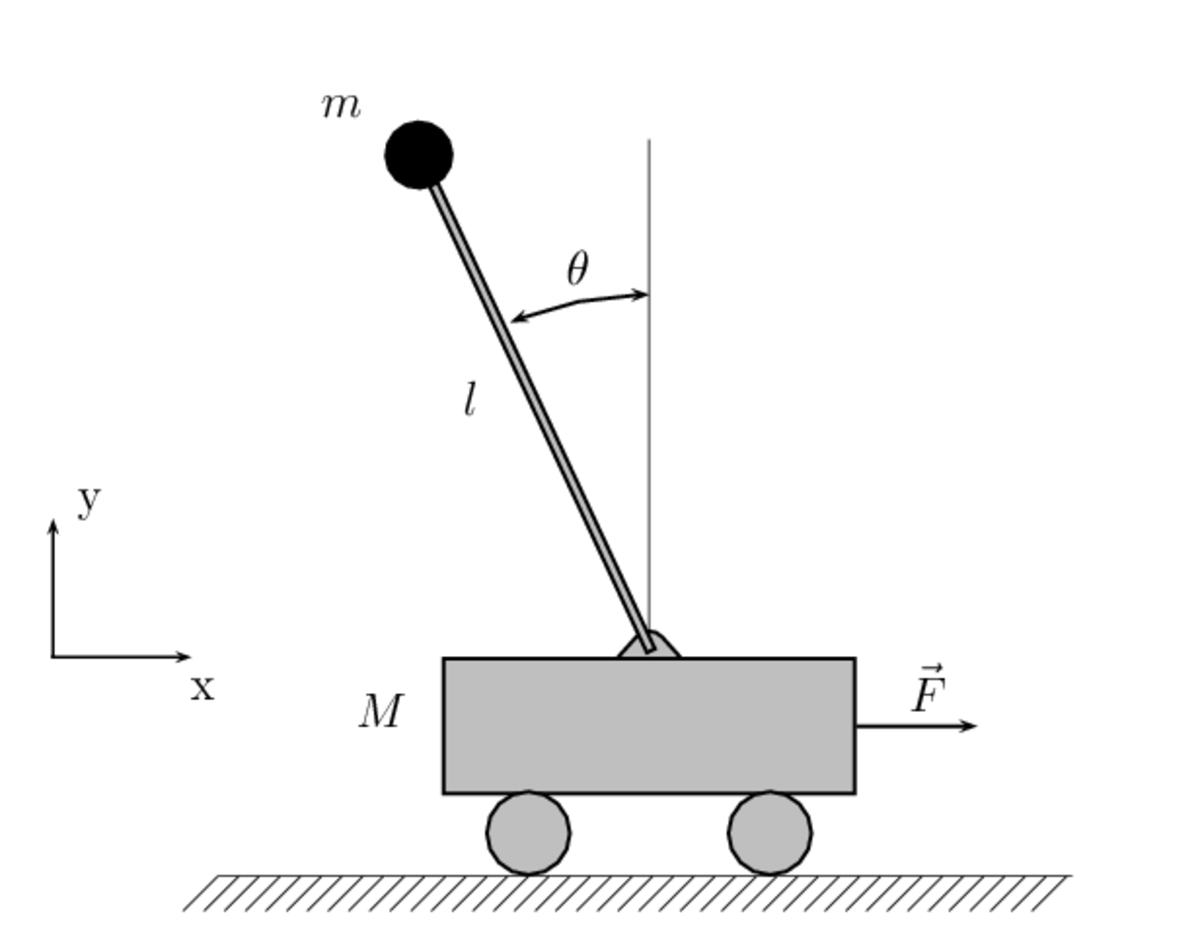
On peut établir les équations du mouvement à partir de la mécanique lagrangienne : en notant x(t) la position du chariot, θ(t) l'angle formé entre la tige et la verticale, le système étant soumis à la gravité et à une force F, extérieure et selon l'axe x, le lagrangien est :
- L = T − V
avec T l'énergie cinétique et V l'énergie potentielle. On a ainsi :

avec v1 la vitesse du chariot et v2 celle de la masse m. On peut exprimer v1 et v2 à partir de x et θ :
-




ce qui s'écrit encore :
-


Le lagrangien est donné par :

et les équations du mouvement sont donc :
-
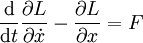
-


En simplifiant ces équations, on obtient les équations, non-linéaires, du mouvement du pendule :
-

-




















































