Coordonnées polaires - Définition
Les systèmes de coordonnées polaires dans


En mécanique classique, elles interviennent naturellement dans tous les problèmes présentant une symétrie de rotation en l'origine, à l'instar du champ gravitationnel d'une boule de densité volumique massique uniforme.
Coordonnées circulaires (coordonnées polaires dans le plan)

Les coordonnées polaires d'un point M du plan vectoriel orienté
- la distance à l'origine r = OM
- et un angle θ = (OA,OM) où A est un point arbitraire différent de O.
Remarque : il n'y a pas unicité dans la définition des coordonnées polaires : on dispose d'une certaine liberté quant au choix de la coordonnée angulaire θ. Entre autres choses :
- On peut rajouter à θ un multiple entier de 2π
- On peut remplacer r par -r en rajoutant π.
Si on veut un choix univoque de r et θ (ce qui n'est pas toujours judicieux), il faut abandonner le point 0. Pour les autres points, on peut imposer r>0 et θ appartenant à ]-π,π] par exemple.
Relations avec les coordonnées cartésiennes
Désignons par (x,y) les coordonnées cartésiennes du point M et par (r,θ) ses coordonnées polaires. Le passage d'un système de coordonnées à l'autre est donné par les formules suivantes :


Une autre formule possible (qui revient à séparer des cas, et qui pose encore des problèmes pour les cas limites)

où u0 est la fonction de Heaviside qui vaut 0 si x est strictement négatif et 1 si x est positif (ou nul), et sgn(y) est le signe de y (-1 si y est négatif, +1 si y est positif).
Difféomorphisme, revêtement
L'application

Le revêtement universel de

Formulaire physique


Coordonnées cylindriques
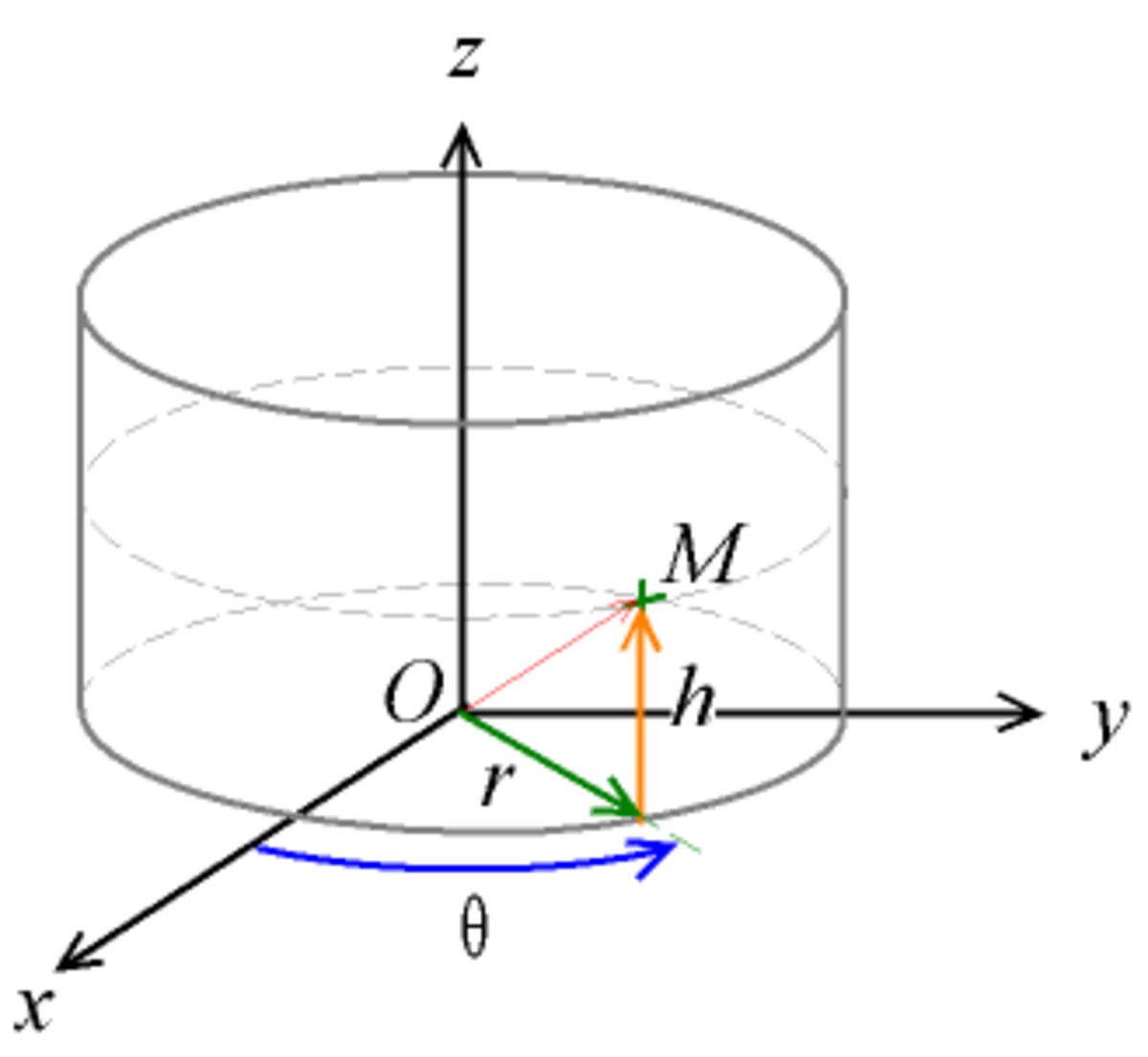
Dans l'espace à trois dimensions, un point M est repéré par
- la distance r de l'origine à sa projection sur Oxy ;
- l'angle θ que fait la projection du vecteur

- la hauteur h du point par rapport au plan Oxy.
Relations avec les coordonnées cartésiennes
Le passage des coordonnées cylindriques aux coordonnées cartésiennes (x,y,z) se fait par :

soit en différentiant

Dans l'autre sens :

et en différentiant :

Coordonnées sphériques
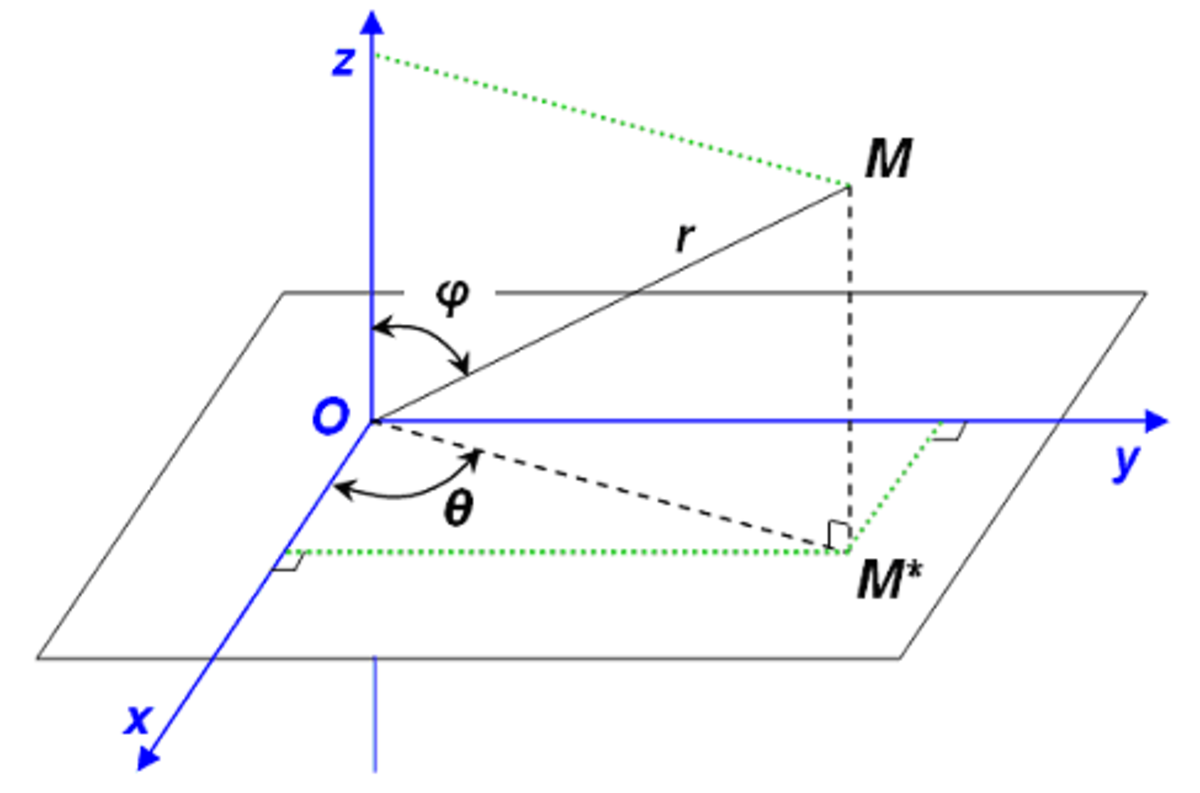
Les coordonnées sphériques d'un point M de l'espace euclidien R3 sont la donnée conjointe de :
- la distance r = OM à l'origine du repère ;
- deux angles, θ et φ, permettant de repérer le point M sur la sphère de centre O et de rayon r.
Il existe plusieurs façons de définir ces angles. La définition développée ci après prend θ azimutal (ou longitudinal) et φ colatitudinal. Pour des applications en physique, il est plutôt d'usage de prendre φ azimutal, et θ colatitudinal. Ainsi :
- l'angle θ est celui que fait la projection du vecteur
- l'angle φ est celui que fait le vecteur
Remarque: On peut également prendre pour défintion de l'angle φ celui que fait le vecteur

Relations avec les coordonnées cartésiennes
Le passage des coordonnées sphériques aux coordonnées cartésiennes (x,y,z) se fait par :

si l'on différentie, on obtient

Dans l'autre sens :

et en différentiant :

Relations avec les coordonnées cylindriques
Le passage des coordonnées cylindriques (r,θcyl,h) aux coordonnées sphériques (ρ,θsph,φ) se fait par :

soit en dérivant :

(on a θ = θcyl = θsph)
Le passage des coordonnées sphériques (ρ,θsph,φ) aux coordonnées cylindriques (r,θcyl,h) se fait par :

soit en dérivant :

(même remarque que ci-dessus).
Généralisation des coordonnées sphériques : angles d'Euler
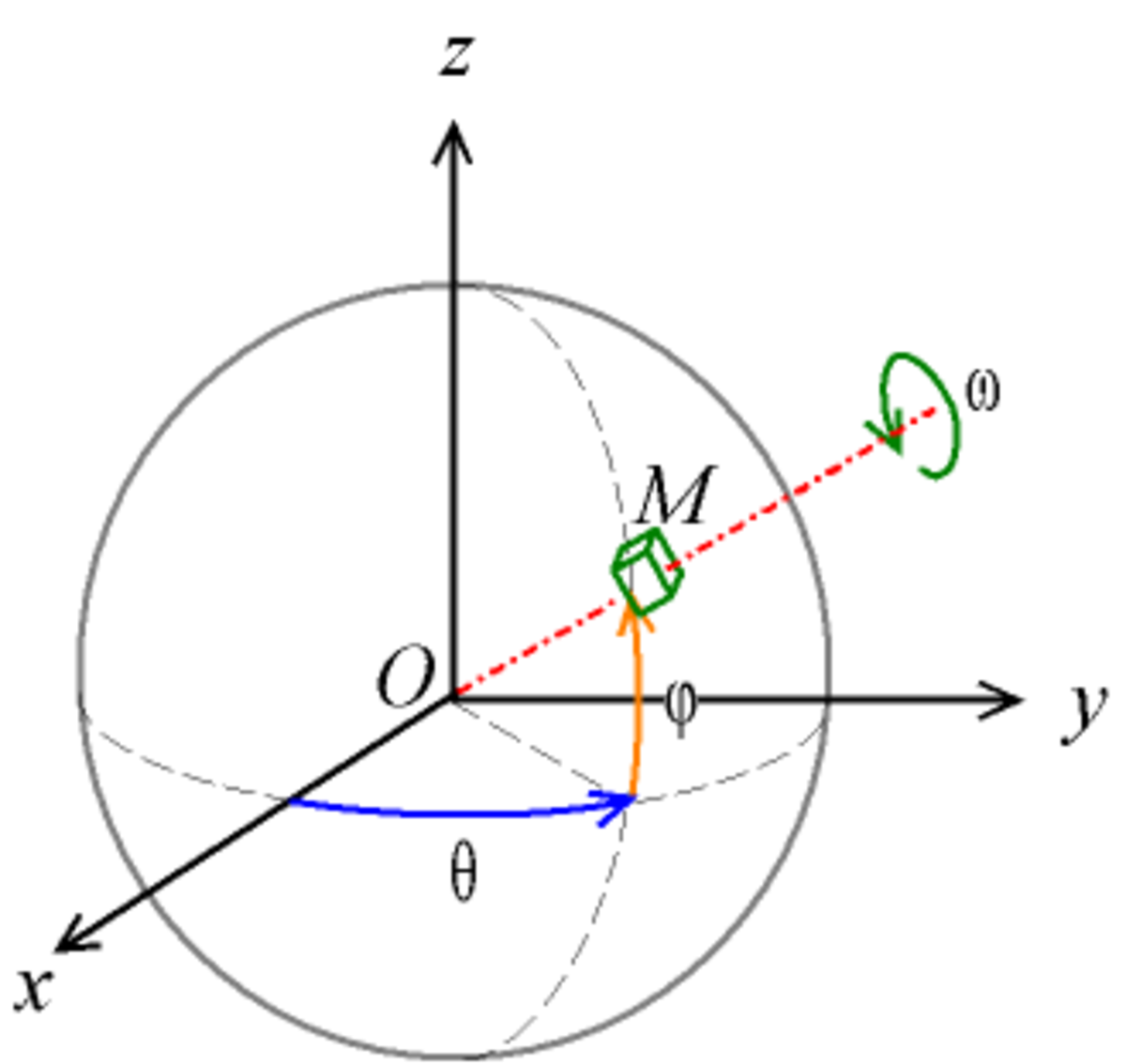
Si l'on ne s'intéresse qu'à l'orientation dans l'espace, on n'utilise pas ρ, par contre, il faut définir un troisième angle ω qui est la rotation autour de l'axe OM. Cette généralisation des coordonnées sphériques (θ,φ,ω) est en fait une définition des angles d'Euler, mais avec des rotations différentes des rotations habituelles :
- rotation d'un angle θ autour de Oz, Oxyz devient Ouvz ;
- rotation d'un angle φ autour de Ov, Ouvz devient Ox'vw ;
- rotation d'un angle ω autour de Ox' , Ox'vw devient Ox'y'z' .
Cette définition n'est pas utilisée, mais elle est présentée ici à titre pédagogique : elle permet de comprendre simplement la notion d'orientation et d'angle d'Euler lorsque l'on a compris celle de coordonnées sphériques.

















































