Machine à courant continu - Définition
Une machine à courant continu est une machine électrique : convertisseur électromécanique permettant la conversion bidirectionnelle d'énergie entre une installation électrique parcourue par un courant continu et un dispositif mécanique.
- En fonctionnement moteur l'énergie électrique est transformée en énergie mécanique.
- En fonctionnement générateur l'énergie mécanique est transformée en énergie électrique. La machine se comporte comme un frein. La génératrice à courant continu est aussi appelée dynamo
Inventeur officiel : Zénobe Gramme. C'était au départ un simple générateur de courant continu (pour applications galvanoplastiques, par exemple, les accumulateurs étant onéreux). Un ouvrier des usines Gramme ayant par erreur branché un dispositif à l'envers, on découvrit ainsi par hasard son utilisation possible comme moteur.
Machine de base ou machine à excitation indépendante
Description sommaire
Une machine électrique à courant continu est constituée :
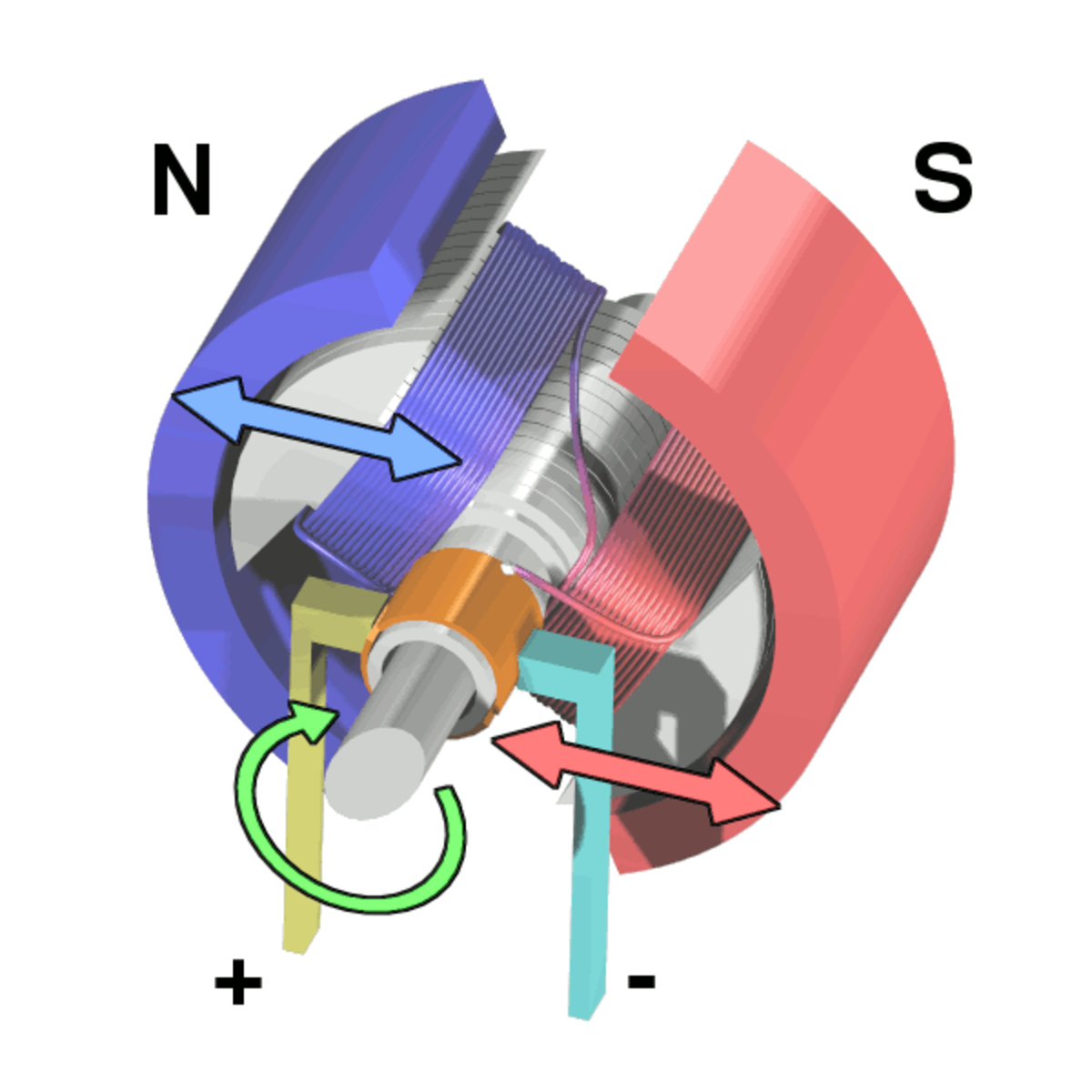
- D'un stator qui est à l'origine de la circulation d'un flux magnétique longitudinal fixe créé soit par des enroulements statoriques soit par des aimants permanents. Ce stator est aussi appelé inducteur en référence au fonctionnement en génératrice de cette machine.
- D'un rotor bobiné relié à un collecteur rotatif inversant la polarité dans chaque enroulement rotorique au moins une fois par tour de façon à faire circuler un flux magnétique transversal en quadrature avec le flux statorique. Les enroulements rotoriques sont aussi appelés enroulements d'induits, ou communément induit en référence au fonctionnement en génératrice de cette machine.
Constitution et principes physiques
Le schéma de ce type de machine est donc le suivant :
- Le courant I, injecté via les balais au collecteur, traverse un conducteur rotorique ( =une spire rotorique ) et change de sens ( =commutation ) au droit des balais. Ceci permet de maintenir la magnétisation du rotor perpendiculaire à celle du stator.
La disposition des balais sur la " ligne neutre " (=zone où la densité de flux est nulle), permet d'obtenir la force contre-électromotrice maximum. Cette ligne peut néanmoins se déplacer par la réaction magnétique d'induit ( influence du flux statorique sur le champ inducteur ) selon que la machine travaille à forte ou à faible charge. Une surtension, due en partie à la mauvaise répartition de la tension entre lames du collecteur et en partie à l'inversion rapide du courant dans les sections de conducteur lors du passage de ces lames sous les balais, risque alors d'apparaître aux bornes de la spire qui commute et de provoquer la destruction progressive du collecteur. Pour palier cela, c’est-à-dire compenser la réaction d'induit, et aussi améliorer la commutation on utilise des pôles auxiliaires de compensation/commutation.
- L'existence du couple s'explique par l'interaction magnétique entre stator et rotor :
- Le champ statorique (Bs sur le schéma) est pratiquement nul sur les conducteurs logés dans des encoches et n'agit donc pas sur eux. L'origine du couple reste la magnétisation transversale du rotor, inchangée au cours de sa rotation (rôle du collecteur). Un pôle statorique agit sur un pôle rotorique et le moteur tourne.
- Une manière classique mais simpliste de calculer le couple est de s'appuyer sur l'existence d'une force de Laplace (fictive) créée par le champ statorique (Bs sur le schéma) et agissant sur les conducteurs rotoriques traversés par l'intensité I . Cette force (FL sur le schéma) qui résulte de cette interaction est identique en module pour deux conducteurs rotoriques diamétralement opposés mais comme ces courants sont en sens inverse grâce au système balais-collecteur, les forces sont aussi de sens opposés.
- La force ainsi créée est proportionnelle à I et à Bs . Le couple moteur T est donc lui aussi proportionnel à ces deux grandeurs.
- La tige conductrice traversée au rotor par le courant I se déplace soumise au champ statorique Bs . Elle est donc le siège d'une force contre-électromotrice (FCEM) induite (loi de Faraday-Lenz) proportionnelle à Bs et à sa vitesse de déplacement donc à la fréquence de rotation. L'ensemble de ces forces contre-électromotrices à pour conséquence l'apparition d'une force contre-électromotrice globale E aux bornes de l'enroulement rotorique qui est proportionnelle à Bs et à la vitesse de rotation du moteur.
- Pour permettre au courant I de continuer à circuler, il faudra que l'alimentation électrique du moteur délivre une tension supérieure à la force contre-électromotrice E induite au rotor.
Schéma électrique idéalisé
Ce schéma rudimentaire n'est pas valable en régime transitoire.
Ri et Re sont respectivement les résistances du rotor et du stator
Ce schéma correspond aux équations électriques suivantes :
- - au stator : Ue = Re . Ie (loi d'ohm) et le champs statorique vaut Bs = ke . Ie (la moins exacte des formules de ce paragraphe car on ne tient pas compte des non-linéarités qui sont importantes et, en plus, on suppose que la machine comporte des enroulements de compensation/commutation qui rendent ce champ indépendant des courants rotoriques. En fait, on fait passer dans ces enroulements de compensation/commutation un courant tel qu'il crée un champ annulant le champ induit au niveau des balais. Ce courant est le courant passant dans l'enroulement d'armature car le champ de commutation doit varier de la même manière que le champ induit.)
- - au rotor : Ui = E + Ri.Ii
D'autre part on a deux équations électromécaniques :
- - La force contre électromotrice : E = Cte . Bs . Ω (Ω = fréquence de rotation en rad/s).
- - Le couple électromécanique (moteur ou résistant) : T = Cte . Bs . Ii
On peut montrer que les constantes sont les mêmes pour les deux lignes, ce qui implique :
- E . Ii = T . Ω ou " Puissance électrique utile " = " Puissance mécanique ".
Descriptif du fonctionnement
Imaginons une machine électrique alimentée par une source de tension U constante. Lorsque le moteur tourne à vide ( il ne fait pas d'effort ) il n'y a pas besoin de fournir de couple, Ii est très faible et U ≈ E. La vitesse de rotation est proportionnelle à U.
- fonctionnement en moteur
Lorsque l'on veut la faire travailler, en appliquant un couple résistant sur son axe, cela la freine donc E diminue.
Comme U reste constante, le produit Ri.Ii augmente donc Ii augmente, donc le couple T augmente lui aussi et lutte contre la diminution de vitesse : c'est un couple moteur.
Plus on le freine, plus le courant augmente pour lutter contre la diminution de vitesse. C'est pourquoi les moteurs à courant continu peuvent " griller " lorsque le rotor est bloqué, si le courant de la source n'est pas limité à une valeur correcte.
- fonctionnement en génératrice
Si une source d'énergie mécanique essaie d'augmenter la vitesse de machine, ( la charge est entrainante : ascenseur par exemple ), Ω augmente donc E augmente.
Comme U reste constante, le produit Ri.Ii devient négatif et augmente en valeur absolue, donc Ii augmente, donc le couple T augmente lui aussi et lutte contre l'augmentation de vitesse : c'est un couple frein.
Le signe du courant ayant changé, le signe de la puissance consommée change lui aussi. La machine consomme une puissance négative, donc elle fourni de la puissance au circuit. Elle est devenue génératrice.
Ces deux modes de fonctionnement existent bien entendu pour les deux sens de rotation de la machine. Celle-ci pouvant passer sans discontinuité d'un sens de rotation ou de couple à l'autre. On dit alors qu'elle fonctionne dans les quatre quadrants du plan couple-vitesse.
Machine à excitation constante
C'est le cas le plus fréquent : Bs est constant car il est créé par des aimants permanents ou bien encore parce que Ie est constant.
Si l'on pose : Cte . Bs = K, les équations du paragraphe précédent deviennent :
-
- U = E + Ri.Ii
- E = K . Ω
- T = K . Ii
Moteur série
L'excitation série étant aujourd'hui réservé à des moteurs, il n'est pas habituel d'utiliser le terme de machine à excitation série.
Ce type de moteur est caractérisé par le fait que le stator est raccordé en série avec le rotor.
- Donc le même courant traverse le rotor et le stator : Ii = Ie = I
et la tension d'alimentation U = Ui + Ue - Bs = ke . I
les équations de la machine deviennent :
-
- U = E + Ri.I + Re . I = E + (Ri + Re) . I
- E = k . ke . I . Ω = K . I . Ω
- T = k . I . ke . I = K . I2
- Les équations ci-dessus permettent de montrer que les moteurs à excitation série peuvent développer un très fort couple en particulier à basse vitesse, celui-ci étant proportionnel au carré du courant. C'est pourquoi ils ont été utilisés pour réaliser des moteurs de traction de locomotives jusque dans les années 1975.
Ce type de machine présente toutefois, du fait de ses caractéristiques, un risque de survitesse et d'emballement à vide. - Aujourd'hui, les principales applications sont :
- les démarreurs d'automobiles.
- les moteurs universels ( perceuses, outillage à main, etc ) : le couple T = K . I2 reste de même sens quel que soit le signe de I. Une des conditions pratiques pour qu'un moteur série soit un moteur universel est que son stator soit feuilleté, car dans ce cas le flux inducteur peut être alternatif. (Remarque : une perceuse prévue pour le raccordement sur le réseau 230V alternatif fonctionne aussi en courant continu : essayez de la brancher sur votre batterie d'automobile, ce n'est que du 12 V et elle tourne ...)
Excitation Shunt
Dans le moteur shunt le stator est monté en parallèle avec le rotor. Il n'y a plus beaucoup d'application à ce montage.
- Donc la tension aux bornes du rotor est la même que celle aux bornes du stator : Ui = Ue = U
- Bs = ke . Ie K . U
les équations de la machine deviennent :
-
- U = E + Ri.Ii
- E = K . U . Ω
- T = K . U . Ii
Excitation composée ou Compound
Dans le moteur compound une partie du stator est raccordé en série avec le rotor et une autre est de type parallèle ou shunt.
- Ce moteur réunit les avantages des deux types de moteur : le fort couple à basse vitesse du moteur série et l'absence d'emballement ( survitesse ) du moteur shunt.
Avantages et inconvénients
L'avantage principal des machines à courant continu réside dans leur adaptation simple aux moyens permettant de régler ou de faire varier leur vitesse, leur couple et leur sens de rotation : les variateurs de vitesse. Voire même leur raccordement direct à la source d'énergie : batteries d'accumulateur, piles, etc.
Le principal problème de ces machines vient de la liaison entre les balais, ou " charbons " et le collecteur rotatif. Ainsi que le collecteur lui même comme indiqué plus haut et la complexité de sa réalisation. De plus il faut signaler que :
- Plus la vitesse de rotation est élevée, plus la pression des balais doit augmenter pour rester en contact avec le collecteur donc plus le frottement est important.
- Aux vitesses élevées les balais doivent donc être remplacés très régulièrement.
- Le collecteur imposant des ruptures de contact provoque des arcs, qui usent rapidement le commutateur et génèrent des parasites dans le circuit d'alimentation, ainsi que par rayonnement électromagnétique.
Un autre problème limite les vitesses d'utilisation élevées de ces moteurs lorsque le rotor est bobiné, c'est le phénomène de "défrettage", la force centrifuge finissant par casser les liens assurant la tenue des ensembles de spires (le frettage).
Un certain nombre de ces inconvénients ont partiellement été résolus par des réalisations de moteurs sans fer au rotor, comme les moteurs "disques" ou les moteurs "cloches", qui néanmoins possèdent toujours des balais.
Les inconvénients ci dessus ont été radicalement éliminés grâce à la technologie du moteur brushless, aussi dénommé " moteur à courant continu sans balais ", ou moteur sans balais.

















































