Mars Reconnaissance Orbiter - Définition
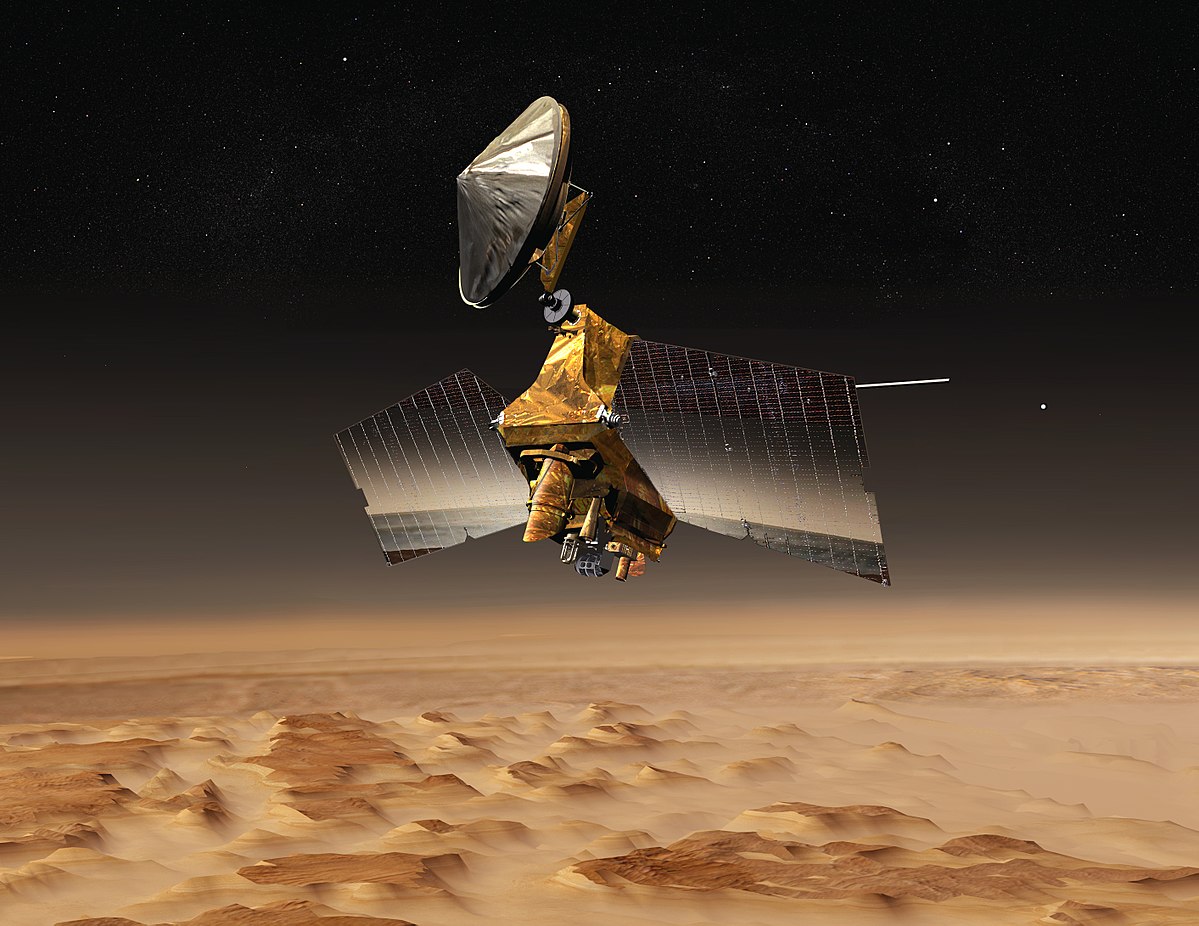

Mars Reconnaissance Orbiter (acronyme : MRO) est une sonde spatiale américaine actuellement en orbite autour de Mars. Son lancement, initialement prévu par la NASA le 10 août 2005, a du être reporté à deux reprises, suite à des incidents techniques (notamment à cause d'un problème mineur sur l'étage Centaur de la fusée Atlas). Elle a été finalement lancée avec succès, le vendredi 12 août 2005, pour une odyssée de 500 millions de kilomètres en direction de Mars.
Le 10 mars 2006, après un voyage de sept mois, elle a exécuté avec succès, au grand soulagement des responsables de la mission, qui suivaient anxieusement l'opération au Jet Propulsion Laboratory de la NASA, à Pasadena en Californie, les délicates manœuvres lui permettant d'entrer en orbite autour de la planète rouge, qu'elle étudiera pendant deux ans. Elle va maintenant se rapprocher peu à peu de Mars grâce à la force d'attraction et passer dans les six prochains mois d'une révolution elliptique de 35 heures à une orbite quasiment circulaire de deux heures autour de l'astre.
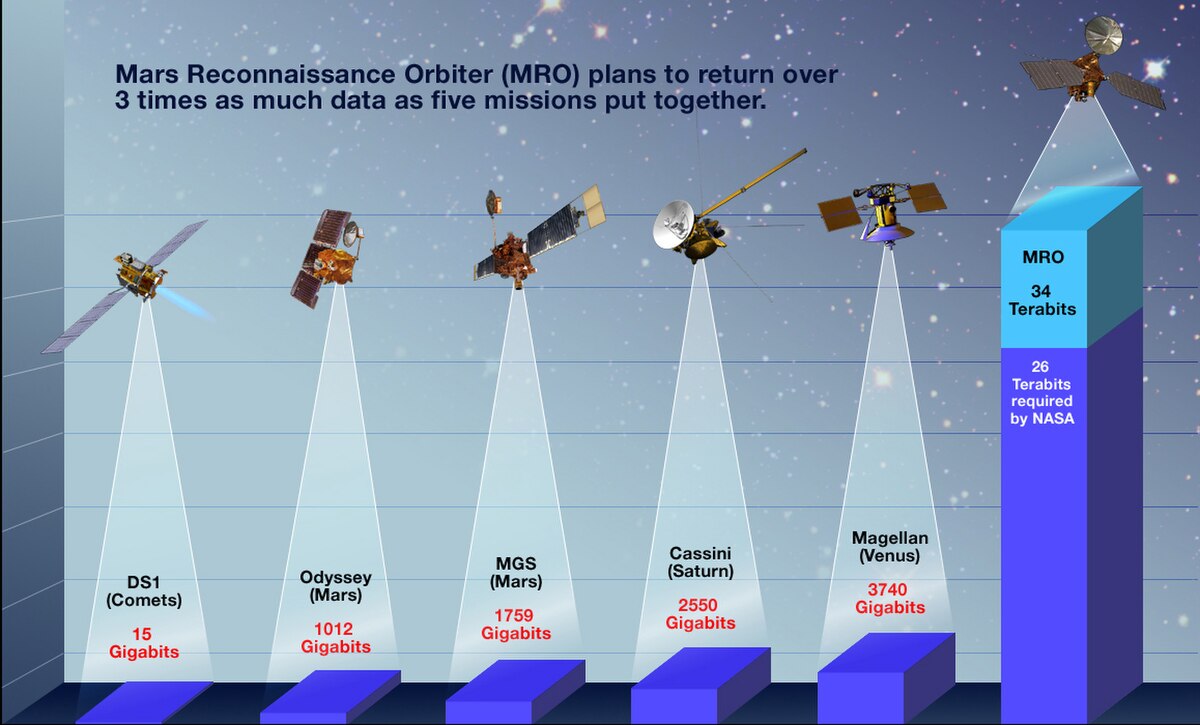
Cette sonde, dont les objectifs scientifiques sont multiples, devrait permettre d'améliorer notre compréhension de Mars, grâce à une observation détaillée de sa surface. Elle permettra de sélectionner d'éventuels sites d'atterrissages pour de futures missions, et elle fera office de relais à haut débit pour les futures sondes présentes à la surface de Mars. Elle remplacera la vieillissante sonde Mars Global Surveyor comme plate-forme principale d'observation de la planète Mars. MRO est devenue, une fois en orbite, le quatrième satellite artificiel en activité de la planète rouge (rejoignant ainsi la sonde européenne Mars Express, et les deux sondes de la NASA Mars Odyssey et Mars Global Surveyor).
Vue d'ensemble
MRO conduira sa mission scientifique durant une période de deux années, après s'être placée sur une orbite circulaire grâce à la technique du freinage atmosphérique (ou aérofreinage), que la NASA commence à maîtriser. Cette technique consiste à ralentir progressivement le vaisseau grâce à la haute atmosphère de Mars pour rendre l'orbite d'un vaisseau plus circulaire. La mission scientifique proprement dite ne commencera que lorsque tous les tests techniques seront effectués (en novembre 2006). Après ses deux années de mission, la sonde continuera très probablement ses observations scientifiques, en continuant à servir de relais de communication.
La sonde Mars Reconnaissance Orbiter préparera donc le terrain pour de futures missions déjà prévues par la NASA, notamment pour le lander appelé Phoenix, sélectionné pour être envoyé durant l'opportunité de lancement de 2007, mais aussi pour un robot mobile appelé Mars Science Laboratory, qui sera développé pour profiter de la fenêtre de lancement de 2009. Les caméras de MRO permettront de choisir les meilleurs sites d'amarsissage pour ces robots, en faisant le meilleur compromis entre risques potentiels et récolte scientifique attendue sur les dits sites. Les capacités supérieures de la sonde MRO en matière de transmission de données permettront de fournir un relais de communication indispensable pour les missions présentes au sol. MRO sera aussi capable de fournir des données essentielles durant l'amarsissage de ces sondes.
Déroulement de la mission
Mars Reconnaissance Orbiter fut lancée le 12 août 2005, depuis le complexe spatial de Cap Canaveral, à bord d'une fusée Atlas V, équipée de l'étage supérieur Centaur. Elle bénéficiait quotidiennement d'une fenêtre de lancement de deux heures entre le 10 août et le 30 août. 56 minutes après le décollage, l'étage Centaur a entièrement brûlé son combustible afin de placer la sonde MRO sur son orbite de transfert interplanétaire en direction de Mars.
MRO a navigué dans l'espace durant 7 mois et demi avant d'atteindre Mars. Quatre corrections de trajectoire pouvaient être éventuellement réalisées, afin que la sonde puisse effectuer sans problème son insertion orbitale une fois arrivée au plus près de Mars.
L'insertion orbitale se produisit lorsque la sonde MRO se rapprocha de Mars, pour la première fois le 10 mars 2006. La sonde passa sous l'hémisphère sud de la planète, à une altitude comprise entre 370 et 400 kilomètres (190 miles). Les 6 moteurs principaux de la sonde brûlèrent leur carburant durant 27 minutes, afin de réduire la vitesse de la sonde de 2900 m/s (6500 miles par heure) à 1900 m/s (4250 miles par heure)
Cette insertion orbitale plaça la sonde sur une orbite polaire très elliptique. Le périapse, c’est-à-dire le point où la sonde se rapproche le plus de la surface, est de 300 kilomètres (180 miles). L'apoapse, le point le plus distant de la surface, est de 45 000 kilomètres (28 000 miles). La sonde met alors 35 heures pour effectuer une orbite complète.
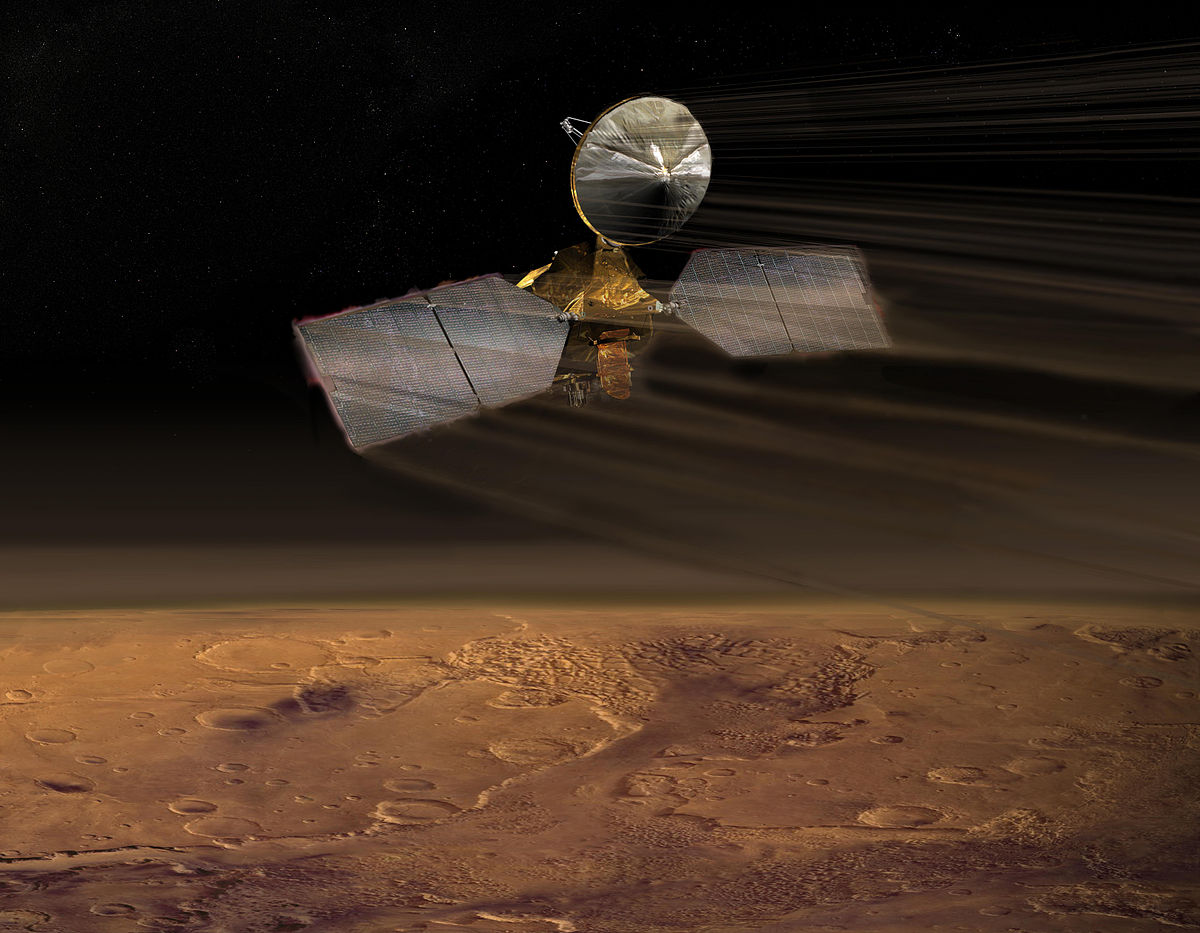
Le freinage atmosphérique (Aerobraking en anglais) commença peu après cette insertion orbitale, pour donner à la sonde une orbite plus basse et plus rapide. Ce freinage permet d'économiser du carburant (presque 50%). Le freinage atmosphérique se déroula en trois étapes :
- MRO abaissa progressivement son périapse en utilisant ses moteurs. L'altitude idéale du freinage atmosphérique fut déterminée le moment venu, elle dépendait de la finesse de l'atmosphère (rappelons que la pression atmosphérique varie selon les saisons sur Mars). Cette première étape fut réalisée en 5 orbites, soit une semaine terrestre.
- MRO resta ensuite à une altitude suffisamment basse pour utiliser le freinage atmosphérique durant 5 mois et demi, soit moins de 500 orbites. Les ingénieurs de la NASA utilisèrent les moteurs de la sonde pour effectuer des corrections occasionnelles du périapse, afin que la sonde ne se désintègre pas dans l'atmosphère ténue. Grâce à ce freinage, l'apoapse devrait être réduite à 450 kilomètres (280 miles).
- Pour terminer la séquence de freinage atmosphérique, la sonde MRO utilisa ses propulseurs pour que son périapse soit situé hors de l'atmosphère martienne (à la fin du mois d'août 2006).
Après cette phase de freinage, les ingénieurs effectueront des ajustements supplémentaires de l'orbite, durant une ou deux semaines, grâce aux moteurs. Ces corrections s'effectueront probablement avant une conjonction solaire qui aura lieu entre le 7 octobre et le 8 novembre 2006. En effet, à cette période, Mars passera derrière le Soleil pour les observateurs terrestres. Après cette phase de freinage atmosphérique, les opérations scientifiques pourront commencer. L'orbite de travail oscillera entre 255 kilomètres (au dessus du pôle Sud) et 320 kilomètres (au dessus du pôle Nord de Mars)[1].
Les opérations scientifiques se dérouleront durant une période nominale de deux ans. Après cela, la mission étendue débutera. La sonde servira de réseau de communication et de navigation pour les landers et les rovers présents au sol.
Instrumentation
Les principaux buts de la mission de Mars Reconnaissance Orbiter sont la recherche d'éventuelles ressources aquifères, la caractérisation de l'atmosphère et de la géologie martienne.
Six instruments scientifiques sont embarqués à bord du vaisseau, ainsi que deux instruments qui utilisent les données récoltées par les sous-systèmes du vaisseau, pour récolter des données scientifiques. Trois démonstrations technologiques sont aussi incluses, pour être éventuellement utilisées lors de missions futures.
- Caméras
- HiRISE (High Resolution Imaging Science Experiment)
- CTX (Context Camera)
- MARCI (Mars Color Imager)
- Spectromètre
- CRISM (Compact Reconnaissance Imaging Spectrometer for Mars)
- Radiomètre
- MCS (Mars Climate Sounder)
- Radar
- SHARAD (Shallow Radar)
Instrumentation scientifique
HiRISE
La caméra HiRISE (en anglais High Resolution Imaging Science Experiment) est constituée d'un télescope réfléchissant de 0,5 mètre, le plus grand jamais utilisé dans une mission spatiale. Cette caméra a une résolution angulaire correspondant à 0,3 mètre au sol depuis une hauteur de 300 kilomètres. Elle prendra des clichés dans 3 bandes de couleurs : en bleu-vert, en rouge et dans l'infrarouge.
Pour faciliter la cartographie de sites potentiels d'amarsissage, la caméra HiRISE peut produire des images stéréo. On pourra ainsi estimer la topographie d'un site avec une précision de 0,25 mètre.

CTX
La caméra de contexte (en anglais Context Imager dont l'acronyme est CTX) fournira des clichés monochromes, pouvant couvrir jusqu'à 40 km de largeur, avec une résolution de 8 mètres par pixel. L'instrument CTX doit fonctionner de manière synchrone avec les deux autres caméras présentes sur la sonde, pour fournir (comme son nom l'indique) des cartes permettant de replacer les images d'HiRISE et de MARCI dans leur contexte global.
MARCI
Le Mars Color Imager, aussi appelé MARCI, fournira des images dans 5 bandes de couleurs visibles, et dans 2 bandes ultraviolettes. MARCI sera utilisé pour réaliser une carte globale de Mars, afin de caractériser les variations journalières, saisonnières et annuelles du climat martien. MARCI fournira aussi des bulletins météo journaliers.
CRISM
L'instrument CRISM est un spectromètre travaillant dans l'infrarouge et la lumière visible. Il produira des cartes détaillées de la minéralogie de la surface martienne. Cet instrument a une résolution de 18 mètres, à une distance orbitale de 300 km. Il opérera dans des longueurs d'onde comprises entre 400 nm et 4050 nm, mesurant leur spectre grâce à 560 canaux de 6,55 nm de largeur chacun. En langue anglaise, CRISM est l' acronyme de : Compact Reconnaissance Imaging Spectrometers for Mars
MCS
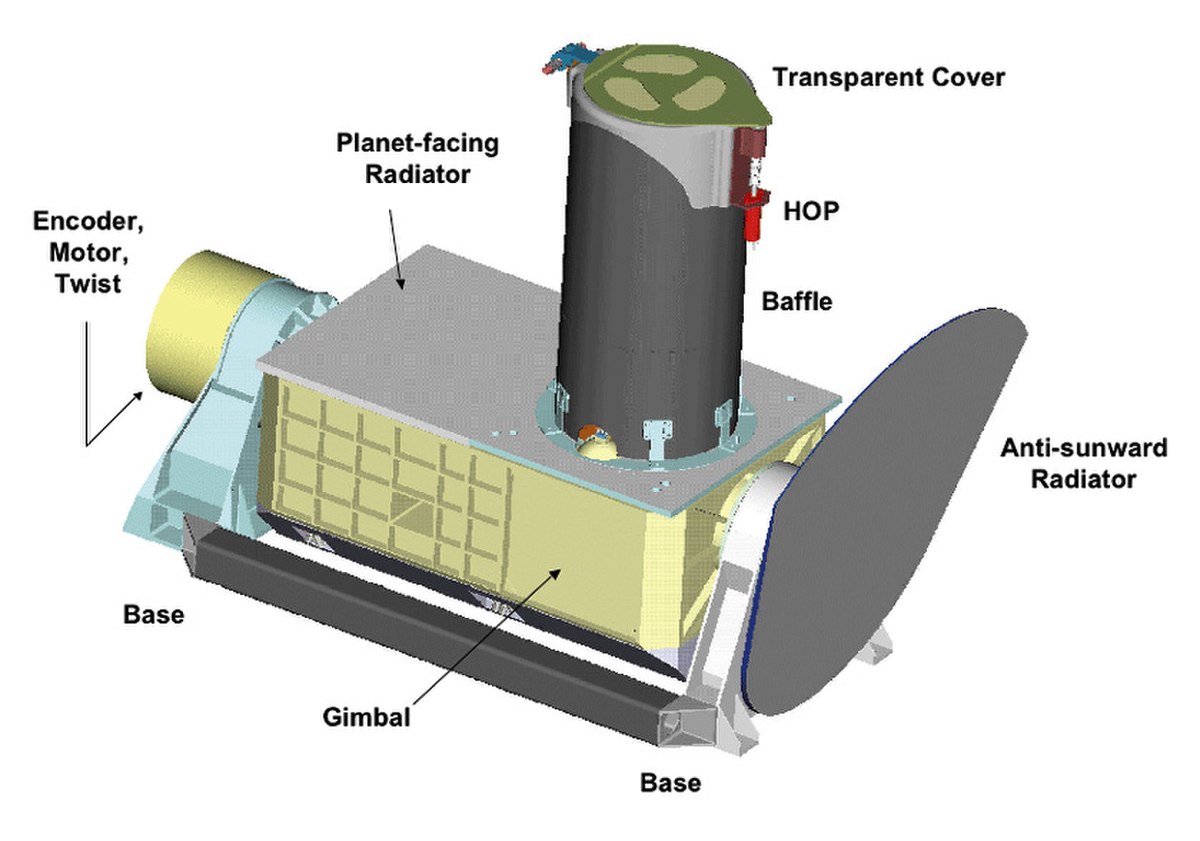
Le Mars Climate Sounder (acronyme MCS) est un spectromètre de 9 canaux, doté d'un canal large bande fonctionnant du proche ultraviolet au proche infrarouge (0.3 à 3.0 µm), et huit canaux fonctionnant dans l'infrarouge moyen (12 à 50 µm). Les différents canaux permettront à l'instrument de mesurer la température, la pression, la vapeur d'eau et les niveaux de poussière présents à la surface.
Il observera l'atmosphère en s'intéressant à l'horizon de la planète visible depuis la sonde. Cet instrument fractionnera cette image de l'horizon, afin d'analyser finement les différentes couches de l'atmosphère. Le MCS sera capable de visualiser des couches de l'atmosphère séparées de 5 km (soit 3 miles).
Les mesures effectuées seront assemblées pour réaliser des cartes journalières et globales de la température montrant les variations atmosphériques sur Mars.
SHARAD
L'expérimentation Shallow Subsurface Radar, surnommée SHARAD, est conçue pour sonder la structure interne de la calotte polaire martienne, mais aussi pour rassembler des informations sur les couches de glace souterraines présentes sur Mars, sur les roches et pour détecter (qui sait !), de l'eau liquide qui pourrait être accessible depuis la surface.
Autres investigations scientifiques
Étude du champ de gravité
Les variations du champ gravitationnel martien peuvent engendrer des variations de vitesse pour la sonde MRO. La vélocité de la sonde sera mesurée en utilisant le décalage doppler de l'orbiteur, dont le signal est renvoyé vers la Terre.
Étude de la structure de l'atmosphère martienne
Des accéléromètres très sensibles sont intégrés à l'orbiteur. Ils permettront de déterminer par déduction la densité atmosphérique. On ne sait pas encore si cette expérience se déroulera uniquement durant la phase de freinage atmosphérique (lorsque MRO est situé à une altitude plus basse, dans des zones plus denses de l'atmosphère), ou durant toute la mission.
Démonstrations technologiques
Electra
Electra est une antenne UHF à haute fréquence, conçue pour communiquer avec les futurs landers dès leur amarsissage. Grâce à Electra, l'arrivée et la localisation de sondes sur Mars seraient plus précises.
Caméra de navigation optique
La caméra de navigation optique prendra des clichés des lunes de Mars, Phobos et Déimos avec les étoiles en arrière plan, afin de déterminer l'orbite de MRO avec plus de précision. Cette expérience n'est pas indispensable au bon fonctionnement de la mission, elle a été incluse pour que les ingénieurs puissent tester de nouvelles techniques de repérage dans l'espace. À l'avenir, les insertions en orbite et les amarsissages pourraient être plus précis.
Données d'ingénierie

Structure de la sonde
Les employés de Lockheed Martin Space Systems ont assemblé la structure du vaisseau à Denver, et lui ont greffé les instruments scientifiques. Le matériel scientifique fut construit à Tucson, par l'Université d'Arizona ; à Laurel, dans le Maryland, au laboratoire de physique appliquée John Hopkins, mais aussi en Europe, à Rome, à l'Agence Spatiale Italienne (ASI); ainsi qu'à San Diego, en Californie, au Malin Space Science Systems et au JPL.
Le vaisseau est composé en grande partie de carbone (un matériau composite contenant du graphite renforcé de plastique), ainsi que de plaquettes alvéolées en aluminium. La charge utile de l'orbiteur dépend du poids du réservoir de carburant, qui occupe la plus grande partie de la structure du vaisseau, il est en titane.
- La masse totale est inférieure à 2,180 kilogrammes.
- La masse à vide (sans carburant) est de moins de 1,031 kilogrammes.
À l'origine, l'orbiteur pesait 2,180 kilogrammes (soit 4,806 livres), mais les ingénieurs ont réussi à réduire le poids de la sonde de 51 kilogrammes (soit 112 livres). Cet allègement de la structure permettra de rajouter un supplément d'hydrazine, afin d'étendre la durée de vie de la sonde jusqu'à 2014.
Système d'alimentation électrique

L'énergie électrique de la sonde Mars Reconnaissance Orbiter provient uniquement de ses deux panneaux solaires. Chaque panneau peut pivoter de façon indépendante autour de deux axes (rotation du haut vers le bas, ou de gauche à droite). Chaque panneau solaire a une aire d'environ 100 mètres carrés, et contient 3744 cellules solaires distinctes. Ces cellules sont constituées de trois couches, elles permettent de convertir plus efficacement l'énergie solaire en électricité. Dans le cas de MRO, ces cellules sont capables de convertir plus de 26% de l'énergie du Soleil en électricité, et connectées ensemble, elles sont capables de délivrer une tension de 32 V. Sur Mars, les deux panneaux solaires fourniront environ 1000 watts à la sonde.
Mars Reconnaissance Orbiter utilisera deux batteries rechargeables au Nickel métal hydrure. Les batteries sont utilisées comme source d'énergie lorsque les panneaux solaires ne font pas face au Soleil (comme durant le lancement, l'insertion orbitale ou le freinage atmosphérique), ou lors des passages dans l'ombre de Mars. Chaque batterie une capacité de 50 Ah, mais la sonde n'ayant pas besoin de toute cette énergie, la batterie sera probablement utilisée au début vers 40% de sa capacité. Cette capacité diminue avec leur usure et celle des panneaux solaires. Lorsque la tension restante tombera sous 20 V, l'ordinateur de bord cessera de fonctionner.
Electronique embarquée
L'ordinateur principal de Mars Reconnaissance Orbiter est un processeur 32-bit RAD750, comprenant 10.4 millions de transistors, et dont l'horloge interne est cadencée à 133 MHz. Ce processeur est une version spéciale du processeur PowerPC750 aussi appelé G3, mais cette version est durcie pour résister aux radiations spatiales. Une carte mère spécifique a été réalisée pour l'occasion. Le processeur RAD750 est le successeur du RAD6000. Bien entendu, ce processeur peut paraître désuet si on le compare à un PC ou à un Macintosh, mais ce processeur est particulièrement fiable dans l'espace, il peut même fonctionner lors des tempêtes solaires.
Les données scientifiques sont stockées dans une mémoire flash de 160 Gigabits (20 giga-octets), constituée d'environ 700 puces de mémoire, chaque puce ayant une capacité de 256 Mo. Cette capacité de stockage n'est pas très importante si l'on considère que le volume de données acquis pèsera lourd. En effet, une seule image de la caméra HiRISE pourra occuper jusqu'à 28 Gigabits de données.
Le système d'exploitation du vaisseau, VxWorks dispose de nombreux outils permettant d'effectuer un monitoring du vaisseau. De nombreux protocoles inclus dans VxWorks lui permettent de diagnostiquer précisément d'éventuelles erreurs.
Systèmes de navigation
Les systèmes de navigation et des senseurs fourniront des données aux ingénieurs (position du vaisseau, cap et altitude).
- Seize senseurs solaires (dont huit de secours) sont placés tout autour du vaisseau, pour mesurer la position de celui-ci par rapport au Soleil.
- Deux " chasseurs " d'étoiles seront utilisés pour fournir un pointage de précision à l'orbiteur, afin de déterminer son orientation et son altitude. Ces " chercheurs d'étoiles " sont de simples caméras numériques utilisées pour reconnaître la position d'étoiles déjà cataloguées de manière autonome.
- Deux centrales inertielles sont aussi présentes à bord (dont une de secours). Elles fourniront des données lors des mouvements du vaisseau. Chaque centrale à inertie est constituée de trois accéléromètres et de trois gyroscopes de type gyroscope-laser (RLG : Ring Laser Gyroscope) .
Système de télécommunications
Le sous-système dédié aux télécommunications utilise une grande antenne pour transmettre ses données à la fréquence couramment utilisée pour les sondes interplanétaires (soit la bande X, à la fréquence de 8 GHz). MRO innovera en utilisant de manière expérimentale la bande Ka, à 32 Ghz, afin de transmettre des données à haut-débit. La vitesse de transmission des données pourrait atteindre 6 Mbit/s, selon les prévisions. Ce taux de transfert de données est dix fois plus élevé que pour les précédents orbiteurs martiens. Deux amplificateurs seront utilisées pour la fréquence radio en bande-X (puissance émise de 100 watts, le second amplificateur étant un appareil de secours). Un amplificateur en bande-Ka consomme 35 watts. Au total, la sonde achemine deux transpondeurs.
Deux antennes plus petites, à faible gain, sont aussi intégrées à la sonde, pour les communications à bas débit (elles seront utilisées en cas de situations critiques, lors du lancement ou de l'insertion en orbite martienne). Ces antennes n'ont pas besoin d'être pointées vers la Terre, elles peuvent transmettre et émettre dans n'importe quelle direction.
Système de propulsion
Un réservoir de carburant de 1175 litres est rempli avec 1187 kg d'hydrazine, un monergol. La pression à l'intérieur du réservoir est régulée par gaz (de l'hélium pressurisé) présent dans un autre réservoir dédié. Près de 70% du carburant sera utilisé pour l'insertion orbitale.
La sonde est dotée de 20 moteurs de poussée.
- 6 moteurs de forte poussée, principalement destinés à l'insertion en orbite. Chacun des moteurs produit 170 newtons de poussée ; soit un total de 1020 newtons de poussée.
- 6 moteurs intermédiaires, pour effectuer des manœuvres de correction de trajectoire, mais aussi pour contrôler la position angulaire, ainsi que la rotation de la sonde durant l'insertion orbitale (en anglais, on parle de l'attitude control pour désigner tous les appareils qui permettent de déterminer l'orientation de l'orbiteur). Chacun de ces moteurs intermédiaires produit 22 newtons de poussée.
- 8 petits moteurs de poussée, aussi présents pour déterminer et corriger l'orientation du véhicule spatial (contrôle de la position angulaire, de la rotation de l'orbiteur). Ces moteurs d'appoint serviront aussi pour toutes les autres opérations lorsque la sonde fonctionnera de manière nominale. Chaque moteur de faible poussée produit 0,9 newtons.
Quatre gyroscopes sont aussi inclus, afin d'orienter finement le satellite, comme par exemple lors de l'acquisition d'images à très haute résolution, où le moindre " faux mouvement " de l'orbiteur pourrait rendre l'image floue. Chaque gyroscope est utilisé pour un mouvement axial. Le quatrième gyroscope pourra remplacer n'importe lequelle des trois autres en cas de défaillance éventuelle. Chaque gyroscope pèse 10 kg, et peut tourner très rapidement (jusqu'à 6000 tours par minute).

















































