Les robots intelligents maîtrisent l'art de la préhension
Restez toujours informé: suivez-nous sur Google Actualités (icone ☆)
©SARAFun
Au cours des dernières décennies, les humains ont eu de plus en plus recours aux robots pour accomplir diverses tâches. Les robots ont été utilisés de façon extensive sur les chaînes de production pour effectuer des tâches telles que l'assemblage de voitures. Cependant, malgré leur succès généralisé, l'assemblage automatique présente encore un inconvénient: le temps nécessaire à la programmation et à la reprogrammation des robots.
Pour relever ce défi, les chercheurs ont mis sur pied SARAFun, un projet financé par l'UE. La nouvelle solution élaborée dans le cadre du projet consiste à doter les robots industriels de capacités de perception, d'apprentissage et de raisonnement, en fournissant des outils permettant d'automatiser la génération de programmes de robots et de concevoir du matériel spécifique aux tâches.
Apprentissage par l'observation du comportement humain
"Le système est bâti autour du concept d'un robot capable d'apprendre et d'exécuter des tâches d'assemblage, telles que l'insertion ou le pliage, en observant le travail d'un instructeur humain", explique le Dr Ioannis Mariolis. Après observation et analyse de la tâche , le robot génère et exécute son propre programme d'assemblage. Sur la base des commentaires de l'instructeur humain ainsi que de l'information sensorielle des capteurs de vision, de force et tactiles, le robot peut progressivement améliorer ses performances en termes de rapidité et de robustesse.L'objectif ambitieux de SARAFun était de développer un système capable d'exécuter de nouvelles tâches d'assemblage en moins d'une journée. "Garantir l'utilisation d'un robot humanoïde pour l'assemblage de petites pièces dans un très petit espace est essentiel pour réduire l'encombrement au sol de l'usine. Cela permet également d'installer le robot dans des postes de travail actuellement réservés à l'homme", ajoute le Dr Mariolis.
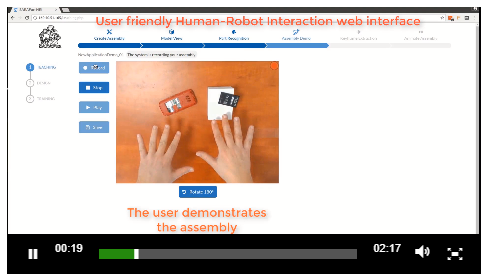
Mise en œuvre de l'interface
Le travail s'est essentiellement appuyé sur une interaction forte et harmonieuse et avec le système à l'aide de l'interface homme-robot. Cette dernière est composée de différents modules qui permettent à l'opérateur d'enseigner la tâche d'assemblage au robot et de superviser le processus d'apprentissage. Dans la phase d'apprentissage, l'utilisateur crée la tâche d'assemblage en lui donnant un nom, en sélectionnant les pièces que le robot doit assembler et en définissant le type d'activité d'assemblage. Au cours de l'étape suivante, les pièces d'assemblage sont placées dans le champ de vision de la caméra et le système est sollicité pour les identifier. Une fois que les pièces ont été détectées, l'opérateur fait une démonstration de la tâche d'assemblage devant la caméra.Les informations enregistrées sont ensuite analysées et les images importantes de la démonstration, appelées images clés, sont extraites automatiquement. Après confirmation de l'utilisateur, le système utilise les informations d'images clés, qui comprennent les positions répertoriées des pièces d'assemblage et les mains de l'instructeur, puis génère le programme d'assemblage pour le robot. Les positions de préhension des pièces d'assemblage sont proposées avec des modèles de doigts robotisés pour augmenter la stabilité de préhension. Après avoir ajusté les positions de préhension et conçu des doigts appropriés pour compenser la dextérité inférieure du robot par rapport à la main humaine, les doigts réels sont imprimés en 3D et installés dans les pinces du robot.
Après le chargement du programme pour exécution, les mouvements du robot sont générés en utilisant l'information extraite des images clés. L'opération d'assemblage est répétée jusqu'à ce que le robot atteigne le niveau d'autonomie désiré.
Programmation quasi nulle
Les chercheurs ont réalisé avec succès de nombreuses démonstrations à l'aide du robot collaboratif à deux bras YuMi d' ABB. Armé de ses pinces, le robot utilise les composants du système de conception de SARAFun (capteurs visuels 3D, planification de la préhension, détection du glissement, contrôle du mouvement et de la force pour les bras et l'interface homme-robot physique) pour reproduire les tâches bimanuelles démontrées par l'instructeur humain."Il en résulte un programme d'assemblage souple capable de s'adapter à l'environnement de travail sans planification spécifique de la part de l'utilisateur. Au regard de la technologie de pointe, l'interface graphique simple est beaucoup plus facile à utiliser pour les non-experts", note le Dr Mariolis. Testé dans différents cas d'utilisation d'assemblage qui impliquent des pièces de téléphones portables et des boutons d'arrêt d'urgence, le système a appris avec succès les tâches d'assemblage démontrées en moins d'une journée.
Innovation révolutionnaire, le robot d'assemblage de SARAFun peut changer de manière radicale le visage de la production industrielle dans le monde entier et favoriser une réévaluation de la fabrication d'assemblages. Les produits à cycle de vie court requièrent des changements fréquents de programmes. Contrairement aux robots actuels qui ne connaissent que leur tâche nominale, ce robot intelligent pour l'assemblage bimanuel de petites pièces possède une capacité illimitée à faire face aux changements réguliers dans la chaîne de production.
Pour plus d'information voir:
- Projet: SARAFun
- robot collaboratif à deux bras YuMi d' ABB
Populaires